Learning-Based Framework for Camera Calibration with Distortion Correction and High Precision Feature Detection
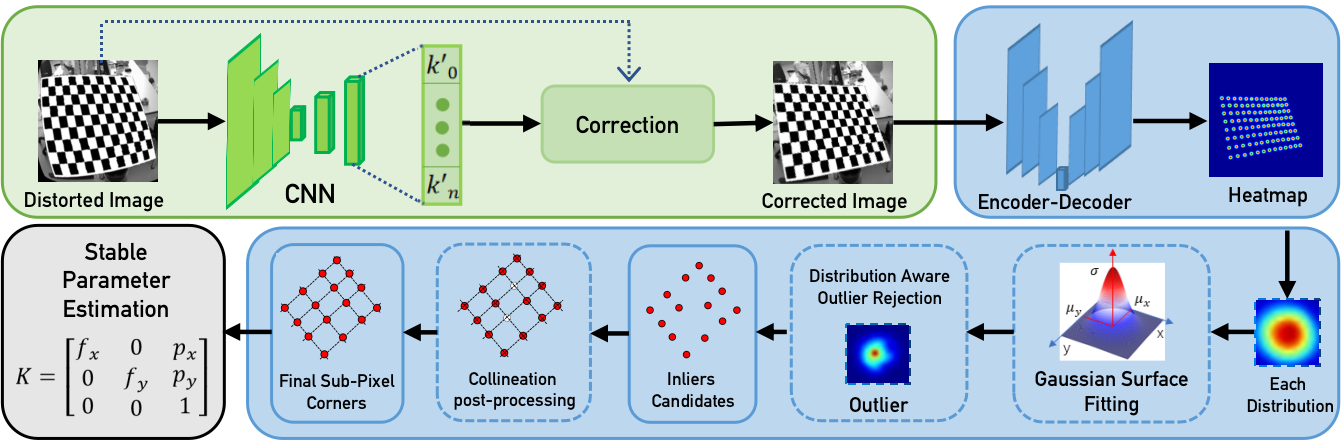
Camera calibration is a crucial technique which significantly influences the performance of many robotic systems. Robustness and high precision have always been the pursuit of diverse calibration methods. State-of-the-art calibration techniques based on classical Zhang's method, however, still suffer from environmental noise, radial lens distortion and sub-optimal parameter estimation. Therefore, in this paper, we propose a hybrid camera calibration framework which combines learning-based approaches with traditional methods to handle these bottlenecks. In particular, this framework leverages learning-based approaches to perform efficient distortion correction and robust chessboard corner coordinate encoding. For sub-pixel accuracy of corner detection, a specially-designed coordinate decoding algorithm with embed outlier rejection mechanism is proposed. To avoid sub-optimal estimation results, we improve the traditional parameter estimation by RANSAC algorithm and achieve stable results. Compared with two widely-used camera calibration toolboxes, experiment results on both real and synthetic datasets manifest the better robustness and higher precision of the proposed framework. The massive synthetic dataset is the basis of our framework's decent performance and will be publicly available along with the code at https://github.com/Easonyesheng/CCS.
PDF Abstract

