Learning Open-World Object Proposals without Learning to Classify
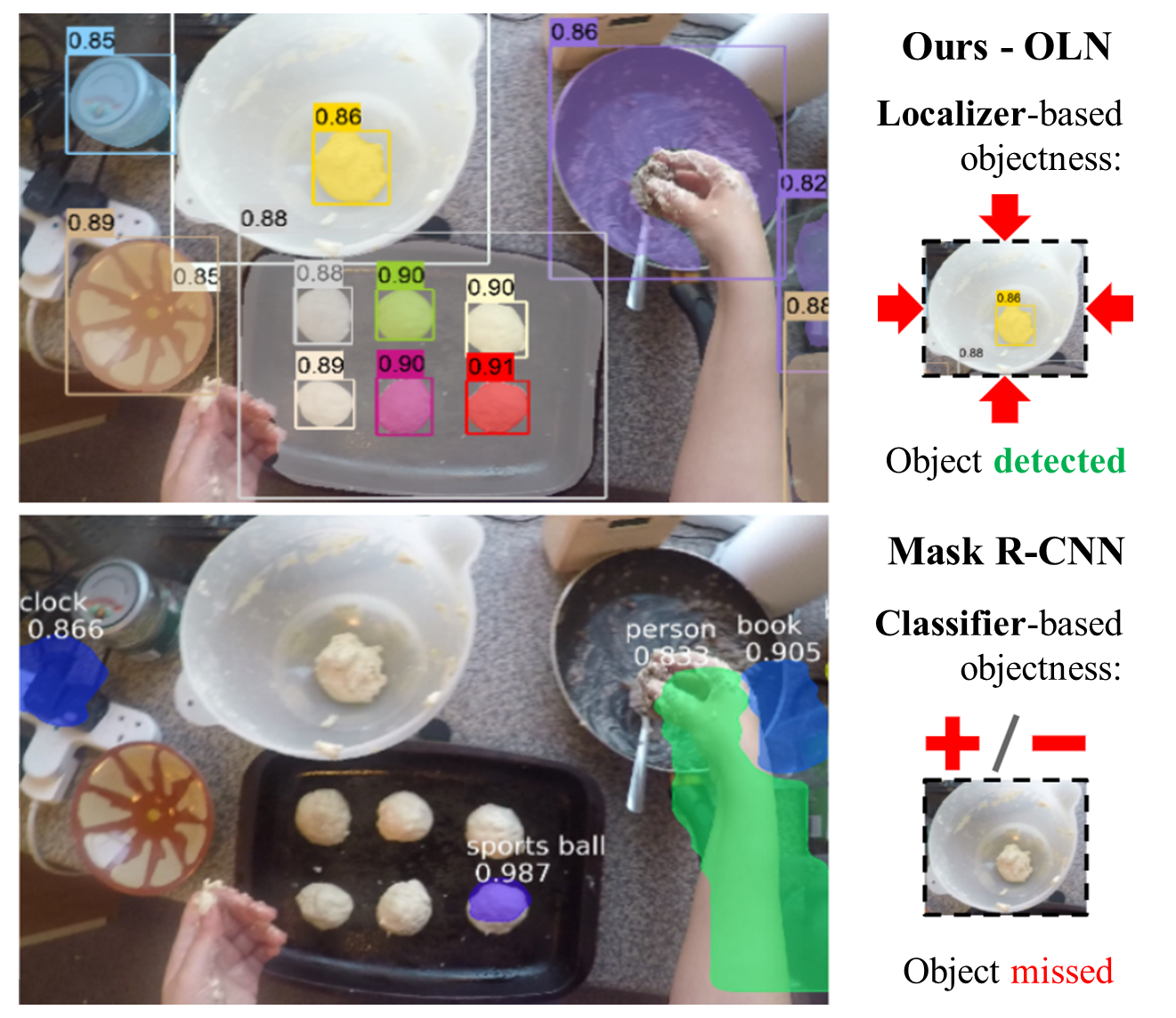
Object proposals have become an integral preprocessing steps of many vision pipelines including object detection, weakly supervised detection, object discovery, tracking, etc. Compared to the learning-free methods, learning-based proposals have become popular recently due to the growing interest in object detection. The common paradigm is to learn object proposals from data labeled with a set of object regions and their corresponding categories. However, this approach often struggles with novel objects in the open world that are absent in the training set. In this paper, we identify that the problem is that the binary classifiers in existing proposal methods tend to overfit to the training categories. Therefore, we propose a classification-free Object Localization Network (OLN) which estimates the objectness of each region purely by how well the location and shape of a region overlap with any ground-truth object (e.g., centerness and IoU). This simple strategy learns generalizable objectness and outperforms existing proposals on cross-category generalization on COCO, as well as cross-dataset evaluation on RoboNet, Object365, and EpicKitchens. Finally, we demonstrate the merit of OLN for long-tail object detection on large vocabulary dataset, LVIS, where we notice clear improvement in rare and common categories.
PDF Abstract


 MS COCO
MS COCO
 LVIS
LVIS
 Objects365
Objects365
 Object Discovery
Object Discovery

