LMSCNet: Lightweight Multiscale 3D Semantic Completion
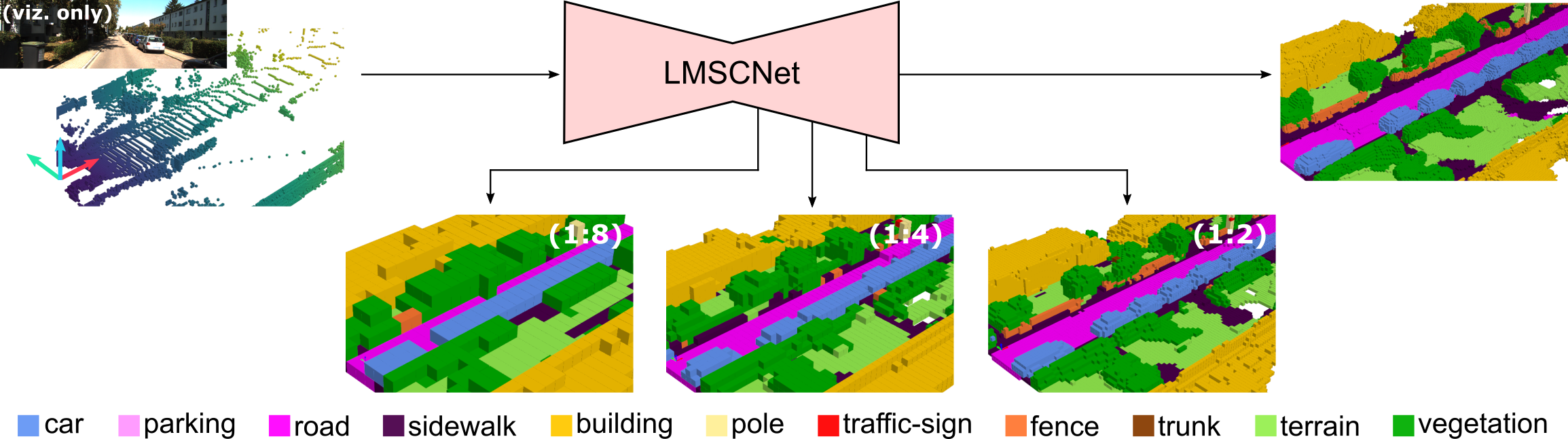
We introduce a new approach for multiscale 3Dsemantic scene completion from voxelized sparse 3D LiDAR scans. As opposed to the literature, we use a 2D UNet backbone with comprehensive multiscale skip connections to enhance feature flow, along with 3D segmentation heads. On the SemanticKITTI benchmark, our method performs on par on semantic completion and better on occupancy completion than all other published methods -- while being significantly lighter and faster. As such it provides a great performance/speed trade-off for mobile-robotics applications. The ablation studies demonstrate our method is robust to lower density inputs, and that it enables very high speed semantic completion at the coarsest level. Our code is available at https://github.com/cv-rits/LMSCNet.
PDF Abstract


 nuScenes
nuScenes
 NYUv2
NYUv2
 SemanticKITTI
SemanticKITTI
 KITTI-360
KITTI-360

