Localization with Sampling-Argmax
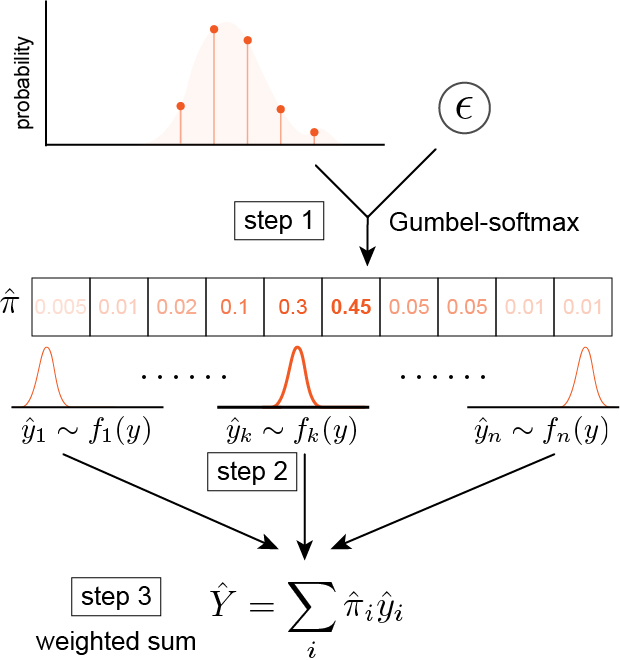
Soft-argmax operation is commonly adopted in detection-based methods to localize the target position in a differentiable manner. However, training the neural network with soft-argmax makes the shape of the probability map unconstrained. Consequently, the model lacks pixel-wise supervision through the map during training, leading to performance degradation. In this work, we propose sampling-argmax, a differentiable training method that imposes implicit constraints to the shape of the probability map by minimizing the expectation of the localization error. To approximate the expectation, we introduce a continuous formulation of the output distribution and develop a differentiable sampling process. The expectation can be approximated by calculating the average error of all samples drawn from the output distribution. We show that sampling-argmax can seamlessly replace the conventional soft-argmax operation on various localization tasks. Comprehensive experiments demonstrate the effectiveness and flexibility of the proposed method. Code is available at https://github.com/Jeff-sjtu/sampling-argmax
PDF Abstract NeurIPS 2021 PDF NeurIPS 2021 Abstract

 MS COCO
MS COCO
 Human3.6M
Human3.6M
 KeypointNet
KeypointNet

