Online Multiple Object Tracking with Cross-Task Synergy
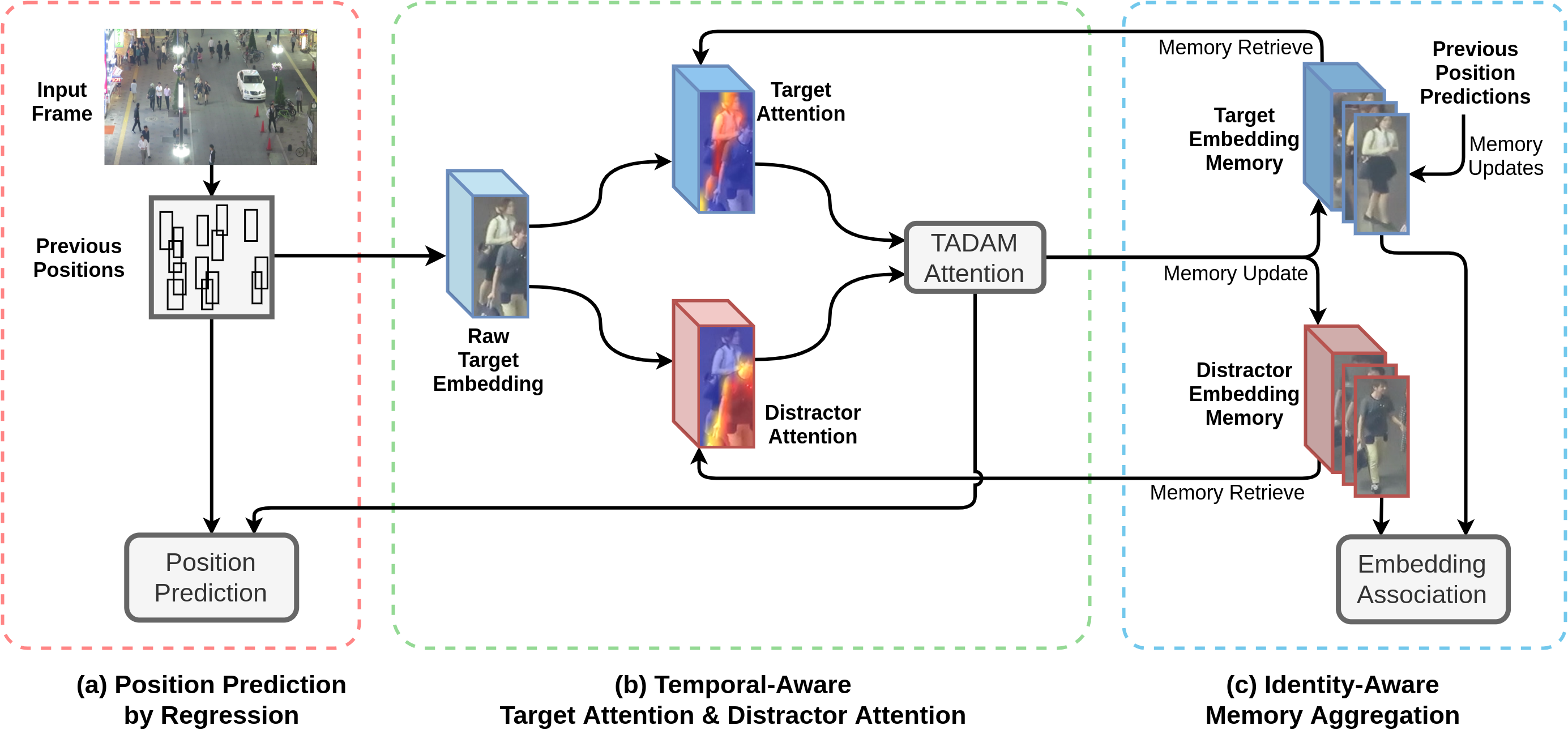
Modern online multiple object tracking (MOT) methods usually focus on two directions to improve tracking performance. One is to predict new positions in an incoming frame based on tracking information from previous frames, and the other is to enhance data association by generating more discriminative identity embeddings. Some works combined both directions within one framework but handled them as two individual tasks, thus gaining little mutual benefits. In this paper, we propose a novel unified model with synergy between position prediction and embedding association. The two tasks are linked by temporal-aware target attention and distractor attention, as well as identity-aware memory aggregation model. Specifically, the attention modules can make the prediction focus more on targets and less on distractors, therefore more reliable embeddings can be extracted accordingly for association. On the other hand, such reliable embeddings can boost identity-awareness through memory aggregation, hence strengthen attention modules and suppress drifts. In this way, the synergy between position prediction and embedding association is achieved, which leads to strong robustness to occlusions. Extensive experiments demonstrate the superiority of our proposed model over a wide range of existing methods on MOTChallenge benchmarks. Our code and models are publicly available at https://github.com/songguocode/TADAM.
PDF Abstract CVPR 2021 PDF CVPR 2021 Abstract


 MOT17
MOT17
 MOT16
MOT16
