Open-Fusion: Real-time Open-Vocabulary 3D Mapping and Queryable Scene Representation
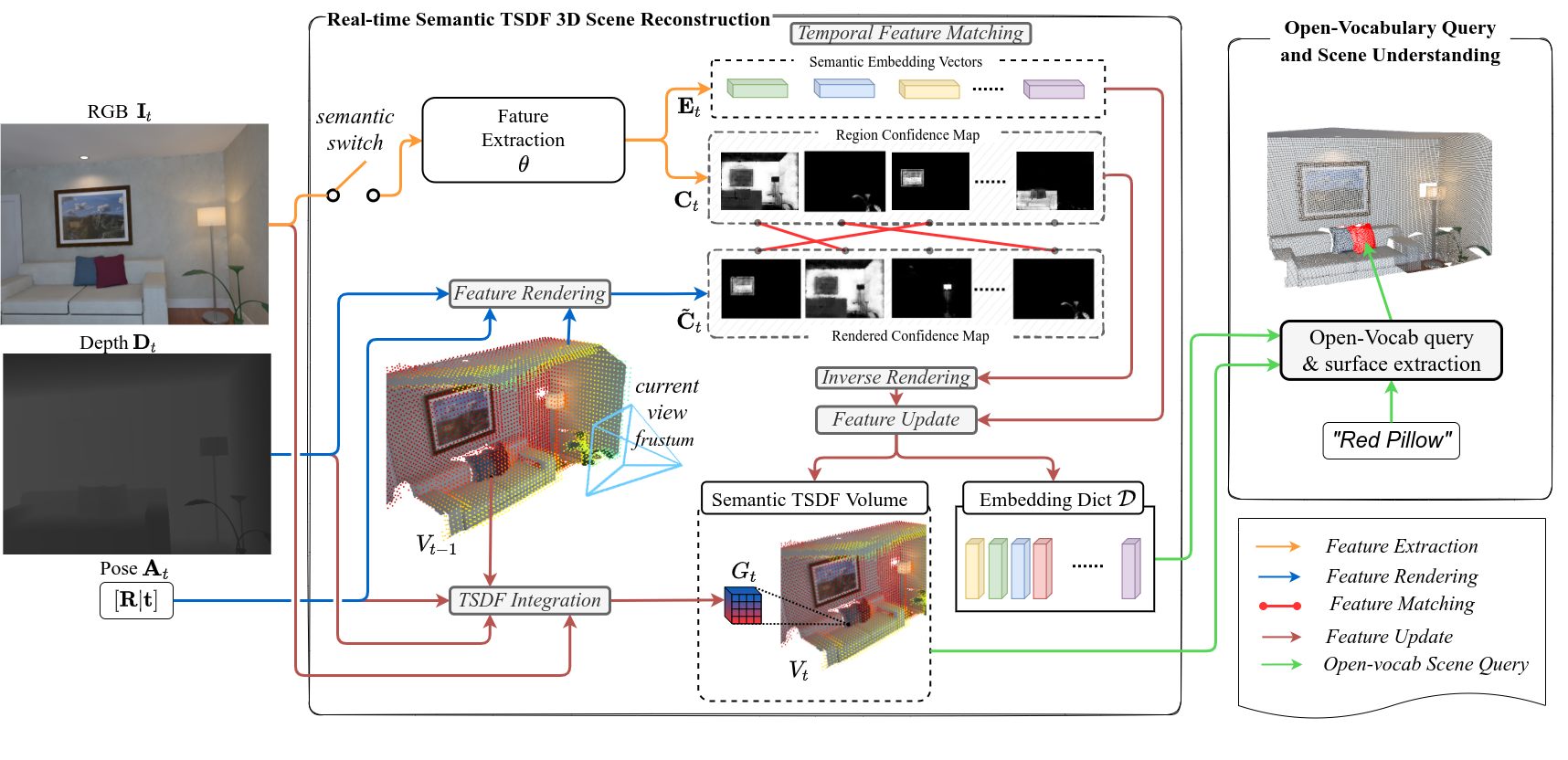
Precise 3D environmental mapping is pivotal in robotics. Existing methods often rely on predefined concepts during training or are time-intensive when generating semantic maps. This paper presents Open-Fusion, a groundbreaking approach for real-time open-vocabulary 3D mapping and queryable scene representation using RGB-D data. Open-Fusion harnesses the power of a pre-trained vision-language foundation model (VLFM) for open-set semantic comprehension and employs the Truncated Signed Distance Function (TSDF) for swift 3D scene reconstruction. By leveraging the VLFM, we extract region-based embeddings and their associated confidence maps. These are then integrated with 3D knowledge from TSDF using an enhanced Hungarian-based feature-matching mechanism. Notably, Open-Fusion delivers outstanding annotation-free 3D segmentation for open-vocabulary without necessitating additional 3D training. Benchmark tests on the ScanNet dataset against leading zero-shot methods highlight Open-Fusion's superiority. Furthermore, it seamlessly combines the strengths of region-based VLFM and TSDF, facilitating real-time 3D scene comprehension that includes object concepts and open-world semantics. We encourage the readers to view the demos on our project page: https://uark-aicv.github.io/OpenFusion
PDF Abstract

 ScanNet
ScanNet
 Replica
Replica
