Parallel Inversion of Neural Radiance Fields for Robust Pose Estimation
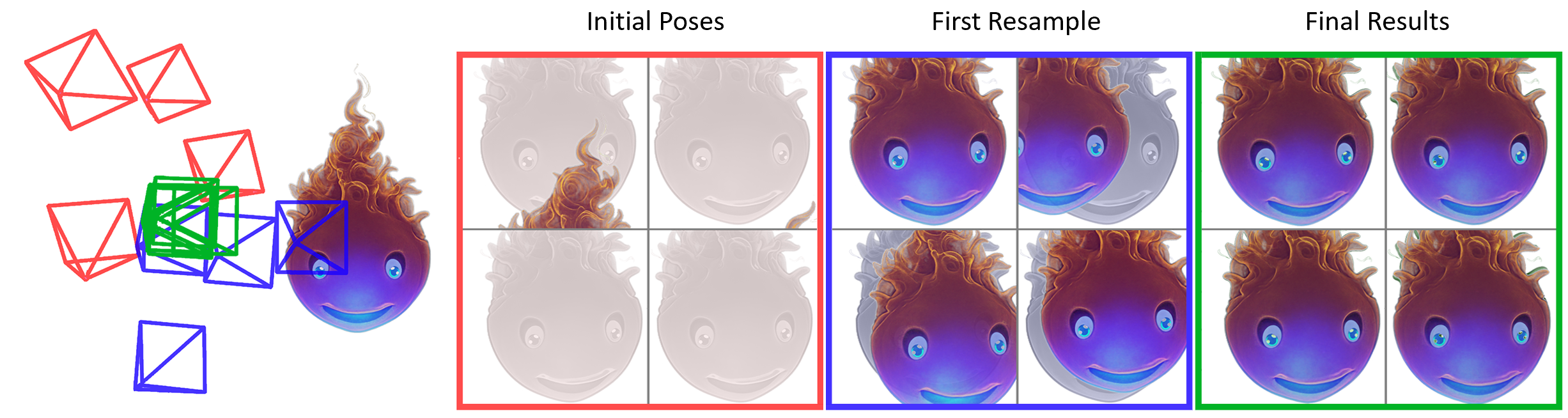
We present a parallelized optimization method based on fast Neural Radiance Fields (NeRF) for estimating 6-DoF pose of a camera with respect to an object or scene. Given a single observed RGB image of the target, we can predict the translation and rotation of the camera by minimizing the residual between pixels rendered from a fast NeRF model and pixels in the observed image. We integrate a momentum-based camera extrinsic optimization procedure into Instant Neural Graphics Primitives, a recent exceptionally fast NeRF implementation. By introducing parallel Monte Carlo sampling into the pose estimation task, our method overcomes local minima and improves efficiency in a more extensive search space. We also show the importance of adopting a more robust pixel-based loss function to reduce error. Experiments demonstrate that our method can achieve improved generalization and robustness on both synthetic and real-world benchmarks.
PDF Abstract

