PCPNet: An Efficient and Semantic-Enhanced Transformer Network for Point Cloud Prediction
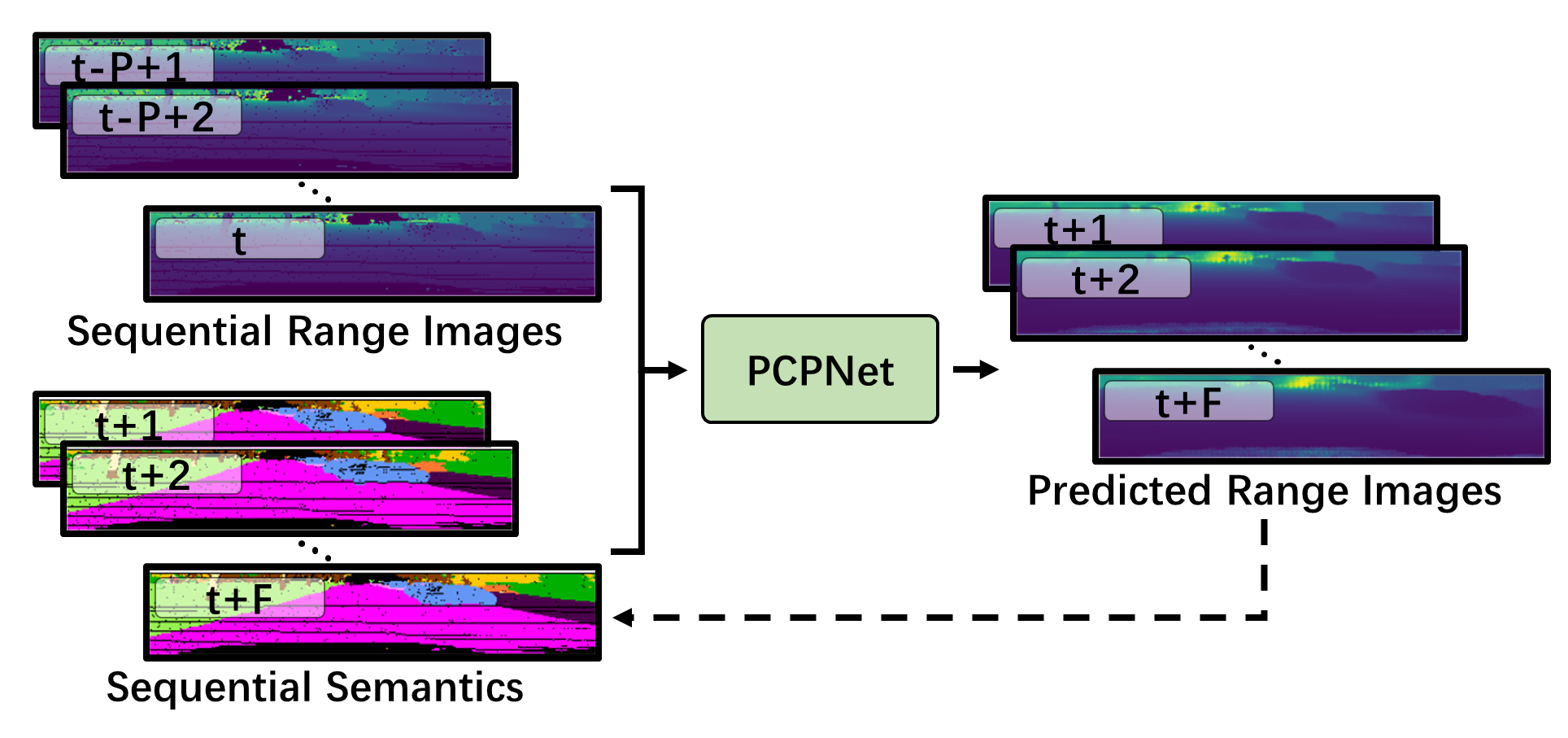
The ability to predict future structure features of environments based on past perception information is extremely needed by autonomous vehicles, which helps to make the following decision-making and path planning more reasonable. Recently, point cloud prediction (PCP) is utilized to predict and describe future environmental structures by the point cloud form. In this letter, we propose a novel efficient Transformer-based network to predict the future LiDAR point clouds exploiting the past point cloud sequences. We also design a semantic auxiliary training strategy to make the predicted LiDAR point cloud sequence semantically similar to the ground truth and thus improves the significance of the deployment for more tasks in real-vehicle applications. Our approach is completely self-supervised, which means it does not require any manual labeling and has a solid generalization ability toward different environments. The experimental results show that our method outperforms the state-of-the-art PCP methods on the prediction results and semantic similarity, and has a good real-time performance. Our open-source code and pre-trained models are available at https://github.com/Blurryface0814/PCPNet.
PDF Abstract



 KITTI
KITTI
 nuScenes
nuScenes
 SemanticKITTI
SemanticKITTI
