ROBEL: Robotics Benchmarks for Learning with Low-Cost Robots
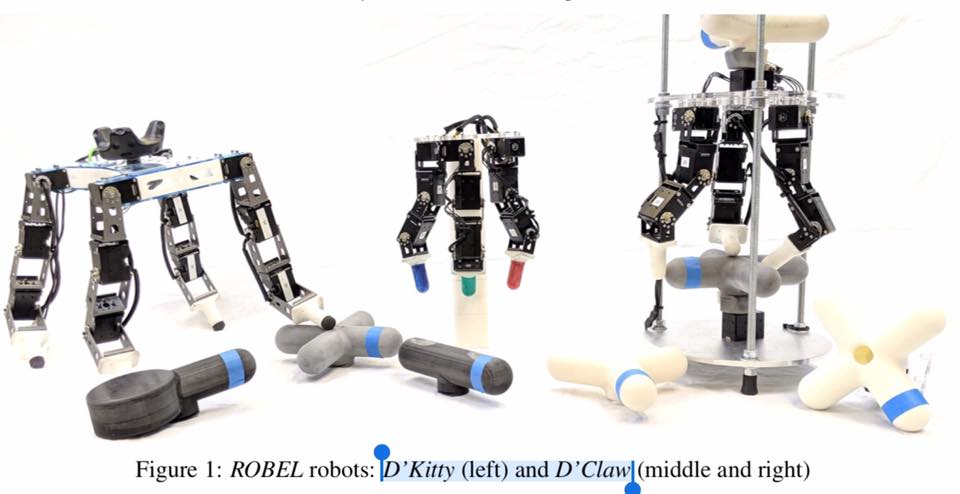
ROBEL is an open-source platform of cost-effective robots designed for reinforcement learning in the real world. ROBEL introduces two robots, each aimed to accelerate reinforcement learning research in different task domains: D'Claw is a three-fingered hand robot that facilitates learning dexterous manipulation tasks, and D'Kitty is a four-legged robot that facilitates learning agile legged locomotion tasks. These low-cost, modular robots are easy to maintain and are robust enough to sustain on-hardware reinforcement learning from scratch with over 14000 training hours registered on them to date. To leverage this platform, we propose an extensible set of continuous control benchmark tasks for each robot. These tasks feature dense and sparse task objectives, and additionally introduce score metrics as hardware-safety. We provide benchmark scores on an initial set of tasks using a variety of learning-based methods. Furthermore, we show that these results can be replicated across copies of the robots located in different institutions. Code, documentation, design files, detailed assembly instructions, final policies, baseline details, task videos, and all supplementary materials required to reproduce the results are available at www.roboticsbenchmarks.org.
PDF Abstract
 MuJoCo
MuJoCo
