Saliency Detection
130 papers with code • 7 benchmarks • 13 datasets
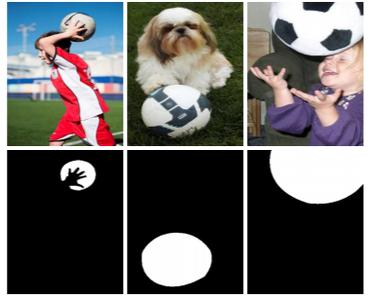
Saliency Detection is a preprocessing step in computer vision which aims at finding salient objects in an image.
Source: An Unsupervised Game-Theoretic Approach to Saliency Detection
Benchmarks
These leaderboards are used to track progress in Saliency Detection
| Trend | Dataset | Best Model | Paper | Code | Compare |
|---|---|---|---|---|---|

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
Libraries
Use these libraries to find Saliency Detection models and implementations PASCAL Context
PASCAL Context
 PASCAL-S
PASCAL-S
 DUTS
DUTS
 HKU-IS
HKU-IS
 DUT-OMRON
DUT-OMRON
 iSUN
iSUN
 CAT2000
CAT2000
 ECSSD
ECSSD
 ReDWeb-S
ReDWeb-S
 Lytro Illum
Lytro Illum
Subtasks


Latest papers with no code
GreenSaliency: A Lightweight and Efficient Image Saliency Detection Method
Image saliency detection is crucial in understanding human gaze patterns from visual stimuli.
CosalPure: Learning Concept from Group Images for Robust Co-Saliency Detection
In this paper, we propose a novel robustness enhancement framework by first learning the concept of the co-salient objects based on the input group images and then leveraging this concept to purify adversarial perturbations, which are subsequently fed to CoSODs for robustness enhancement.
Extracting Human Attention through Crowdsourced Patch Labeling
We demonstrated the effectiveness of our method in mitigating bias through improved classification accuracy and the refined focus of the model.
Auxiliary Tasks Enhanced Dual-affinity Learning for Weakly Supervised Semantic Segmentation
We propose AuxSegNet+, a weakly supervised auxiliary learning framework to explore the rich information from these saliency maps and the significant inter-task correlation between saliency detection and semantic segmentation.
Enhancing Protein Predictive Models via Proteins Data Augmentation: A Benchmark and New Directions
Augmentation is an effective alternative to utilize the small amount of labeled protein data.
Joint Attention-Guided Feature Fusion Network for Saliency Detection of Surface Defects
To address these issues, we propose a joint attention-guided feature fusion network (JAFFNet) for saliency detection of surface defects based on the encoder-decoder network.
A Saliency Enhanced Feature Fusion based multiscale RGB-D Salient Object Detection Network
SEFF utilizes saliency maps of the neighboring scales to enhance the necessary features for fusing, resulting in more representative fused features.
A Volumetric Saliency Guided Image Summarization for RGB-D Indoor Scene Classification
Thus, tasks such as scene classification, identification, indexing, etc., can be performed efficiently using the unique summary.
HEAP: Unsupervised Object Discovery and Localization with Contrastive Grouping
Further, to ensure the distinguishability among various regions, we introduce a region-level contrastive clustering loss to pull closer similar regions across images.
Viewport Prediction for Volumetric Video Streaming by Exploring Video Saliency and Trajectory Information
To our knowledge, this is the first comprehensive study of viewport prediction in volumetric video streaming.
