Search Results for author:
Found 5 papers, 2 papers with code
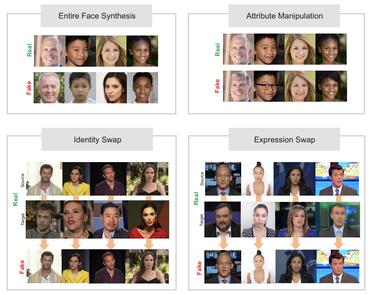
Diff-ID: An Explainable Identity Difference Quantification Framework for DeepFake Detection
We then visualize the identity loss between the test and the reference image from the image differences of the aligned pairs, and design a custom metric to quantify the identity loss.

WeakM3D: Towards Weakly Supervised Monocular 3D Object Detection
This network is learned by minimizing our newly-proposed 3D alignment loss between the 3D box estimates and the corresponding RoI LiDAR points.
Digging Into Output Representation for Monocular 3D Object Detection
This characteristic indicates that monocular 3D detection is inherently different from other typical detection tasks that have the same dimensional input and output.
Lidar Point Cloud Guided Monocular 3D Object Detection
We delve into this underlying mechanism and then empirically find that: concerning the label accuracy, the 3D location part in the label is preferred compared to other parts of labels.
OCM3D: Object-Centric Monocular 3D Object Detection
Image-only and pseudo-LiDAR representations are commonly used for monocular 3D object detection.
