Search Results for author:
Found 7 papers, 3 papers with code
CoReS: Orchestrating the Dance of Reasoning and Segmentation
We believe that the act of reasoning segmentation should mirror the cognitive stages of human visual search, where each step is a progressive refinement of thought toward the final object.

DreamLIP: Language-Image Pre-training with Long Captions
Motivated by this, we propose to dynamically sample sub-captions from the text label to construct multiple positive pairs, and introduce a grouping loss to match the embeddings of each sub-caption with its corresponding local image patches in a self-supervised manner.


Understanding the Multi-modal Prompts of the Pre-trained Vision-Language Model
In this paper, we conduct a direct analysis of the multi-modal prompts by asking the following questions: $(i)$ How do the learned multi-modal prompts improve the recognition performance?
SKDF: A Simple Knowledge Distillation Framework for Distilling Open-Vocabulary Knowledge to Open-world Object Detector
Ablation experiments demonstrate that both of them are effective in mitigating the impact of open-world knowledge distillation on the learning of known objects.
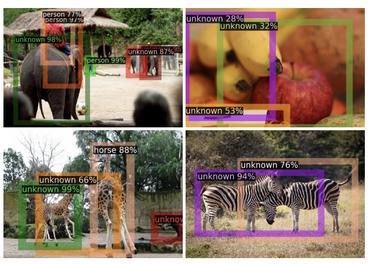
Detecting the open-world objects with the help of the Brain
We propose leveraging the VL as the ``Brain'' of the open-world detector by simply generating unknown labels.
FGAHOI: Fine-Grained Anchors for Human-Object Interaction Detection
HSAM and TAM semantically align and merge the extracted features and query embeddings in the hierarchical spatial and task perspectives in turn.
 Ranked #6 on
Human-Object Interaction Detection
on HICO-DET
Ranked #6 on
Human-Object Interaction Detection
on HICO-DET
CAT: LoCalization and IdentificAtion Cascade Detection Transformer for Open-World Object Detection
Open-world object detection (OWOD), as a more general and challenging goal, requires the model trained from data on known objects to detect both known and unknown objects and incrementally learn to identify these unknown objects.