Search Results for author:
Found 2 papers, 2 papers with code
VIMA: General Robot Manipulation with Multimodal Prompts
We show that a wide spectrum of robot manipulation tasks can be expressed with multimodal prompts, interleaving textual and visual tokens.


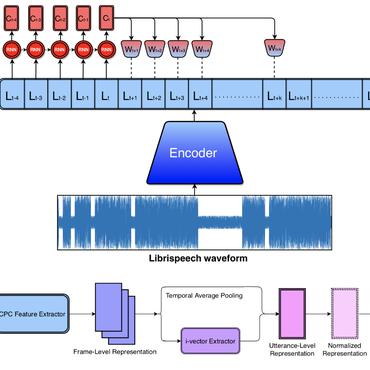
Dynamically Mitigating Data Discrepancy with Balanced Focal Loss for Replay Attack Detection
Besides, in the experiments, we select three kinds of features that contain both magnitude-based and phase-based information to form complementary and informative features.
Cannot find the paper you are looking for? You can
Submit a new open access paper.
