An Open-Source Multi-Goal Reinforcement Learning Environment for Robotic Manipulation with Pybullet
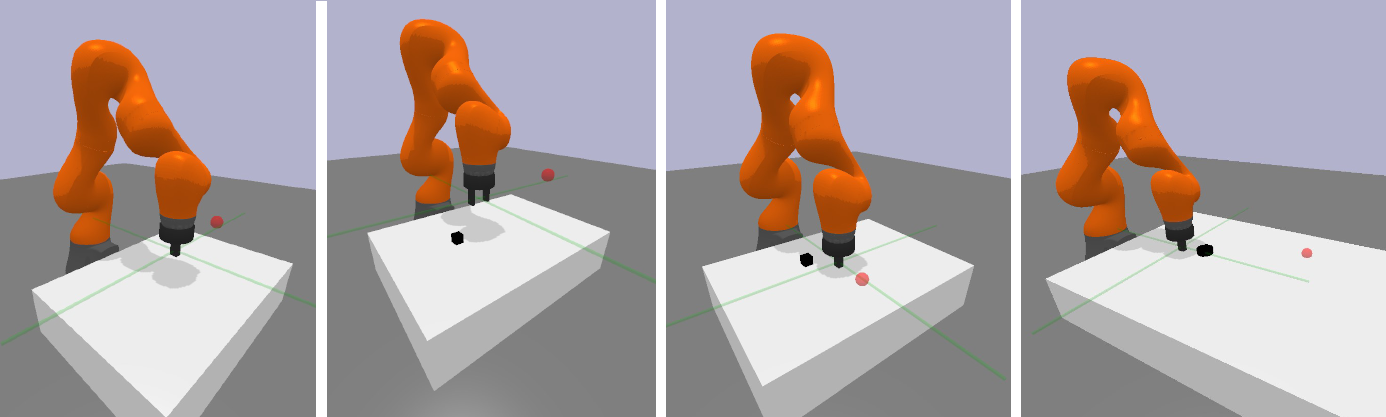
This work re-implements the OpenAI Gym multi-goal robotic manipulation environment, originally based on the commercial Mujoco engine, onto the open-source Pybullet engine. By comparing the performances of the Hindsight Experience Replay-aided Deep Deterministic Policy Gradient agent on both environments, we demonstrate our successful re-implementation of the original environment. Besides, we provide users with new APIs to access a joint control mode, image observations and goals with customisable camera and a built-in on-hand camera. We further design a set of multi-step, multi-goal, long-horizon and sparse reward robotic manipulation tasks, aiming to inspire new goal-conditioned reinforcement learning algorithms for such challenges. We use a simple, human-prior-based curriculum learning method to benchmark the multi-step manipulation tasks. Discussions about future research opportunities regarding this kind of tasks are also provided.
PDF Abstract

 MuJoCo
MuJoCo
 OpenAI Gym
OpenAI Gym
