Contrastive Boundary Learning for Point Cloud Segmentation
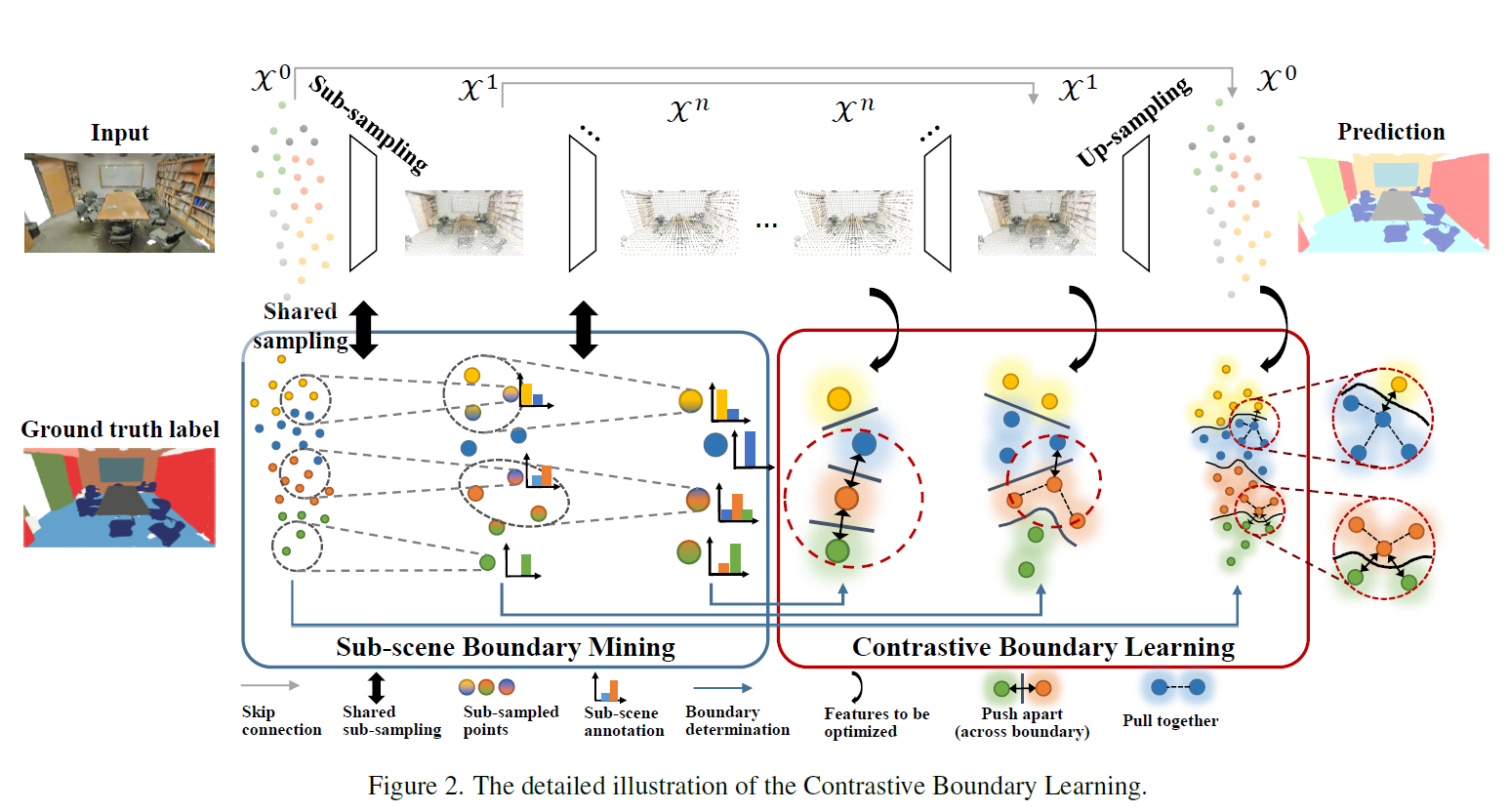
Point cloud segmentation is fundamental in understanding 3D environments. However, current 3D point cloud segmentation methods usually perform poorly on scene boundaries, which degenerates the overall segmentation performance. In this paper, we focus on the segmentation of scene boundaries. Accordingly, we first explore metrics to evaluate the segmentation performance on scene boundaries. To address the unsatisfactory performance on boundaries, we then propose a novel contrastive boundary learning (CBL) framework for point cloud segmentation. Specifically, the proposed CBL enhances feature discrimination between points across boundaries by contrasting their representations with the assistance of scene contexts at multiple scales. By applying CBL on three different baseline methods, we experimentally show that CBL consistently improves different baselines and assists them to achieve compelling performance on boundaries, as well as the overall performance, eg in mIoU. The experimental results demonstrate the effectiveness of our method and the importance of boundaries for 3D point cloud segmentation. Code and model will be made publicly available at https://github.com/LiyaoTang/contrastBoundary.
PDF Abstract CVPR 2022 PDF CVPR 2022 Abstract


 ScanNet
ScanNet
 S3DIS
S3DIS
 Semantic3D
Semantic3D

