Fast Kernel Scene Flow
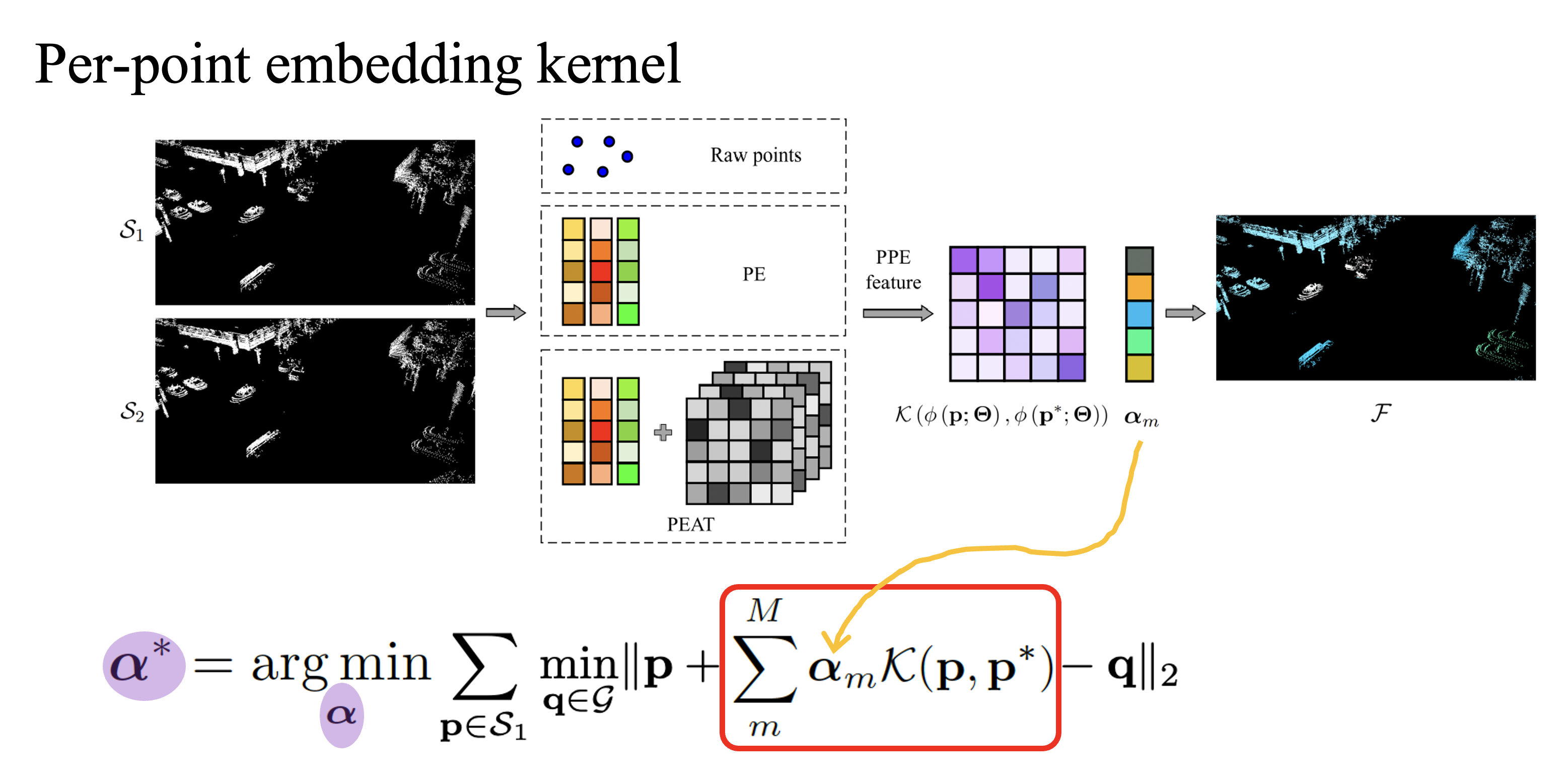
In contrast to current state-of-the-art methods, such as NSFP [25], which employ deep implicit neural functions for modeling scene flow, we present a novel approach that utilizes classical kernel representations. This representation enables our approach to effectively handle dense lidar points while demonstrating exceptional computational efficiency -- compared to recent deep approaches -- achieved through the solution of a linear system. As a runtime optimization-based method, our model exhibits impressive generalizability across various out-of-distribution scenarios, achieving competitive performance on large-scale lidar datasets. We propose a new positional encoding-based kernel that demonstrates state-of-the-art performance in efficient lidar scene flow estimation on large-scale point clouds. An important highlight of our method is its near real-time performance (~150-170 ms) with dense lidar data (~8k-144k points), enabling a variety of practical applications in robotics and autonomous driving scenarios.
PDF Abstract



 Waymo Open Dataset
Waymo Open Dataset
 Argoverse
Argoverse
 FlyingThings3D
FlyingThings3D
