FedDrive: Generalizing Federated Learning to Semantic Segmentation in Autonomous Driving
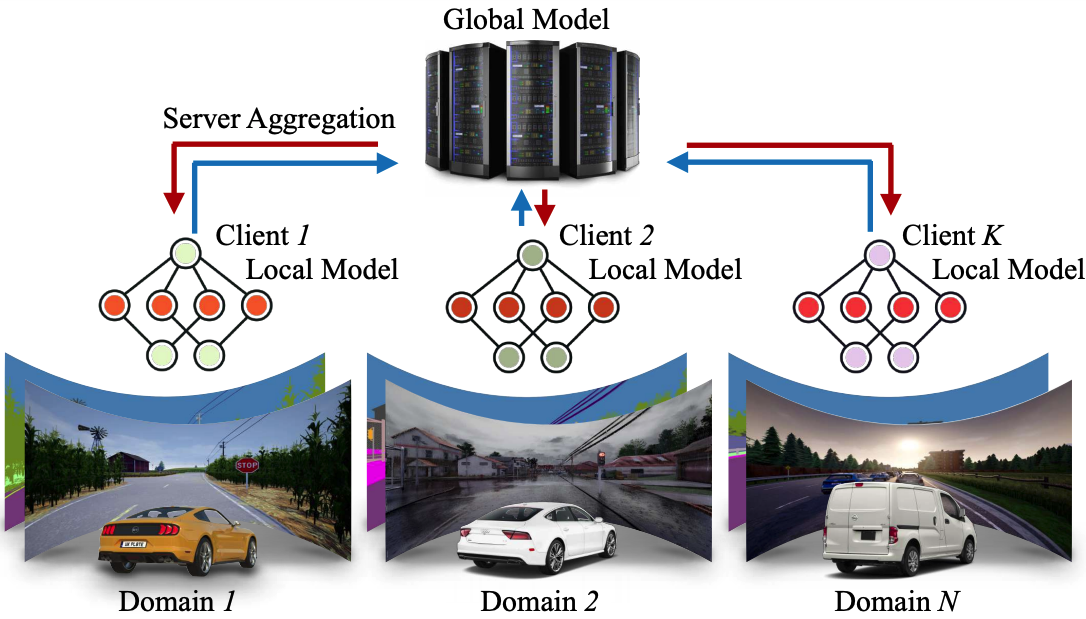
Semantic Segmentation is essential to make self-driving vehicles autonomous, enabling them to understand their surroundings by assigning individual pixels to known categories. However, it operates on sensible data collected from the users' cars; thus, protecting the clients' privacy becomes a primary concern. For similar reasons, Federated Learning has been recently introduced as a new machine learning paradigm aiming to learn a global model while preserving privacy and leveraging data on millions of remote devices. Despite several efforts on this topic, no work has explicitly addressed the challenges of federated learning in semantic segmentation for driving so far. To fill this gap, we propose FedDrive, a new benchmark consisting of three settings and two datasets, incorporating the real-world challenges of statistical heterogeneity and domain generalization. We benchmark state-of-the-art algorithms from the federated learning literature through an in-depth analysis, combining them with style transfer methods to improve their generalization ability. We demonstrate that correctly handling normalization statistics is crucial to deal with the aforementioned challenges. Furthermore, style transfer improves performance when dealing with significant appearance shifts. Official website: https://feddrive.github.io.
PDF Abstract




 Cityscapes
Cityscapes
