From Coarse to Fine: Robust Hierarchical Localization at Large Scale
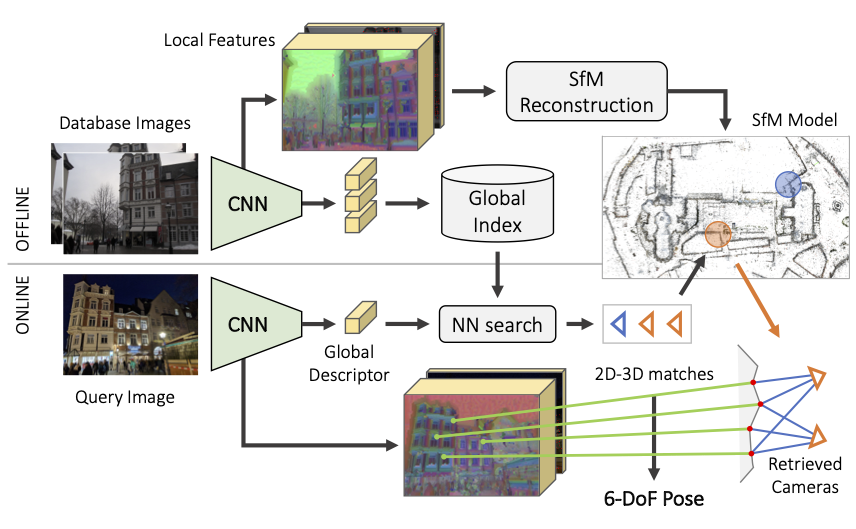
Robust and accurate visual localization is a fundamental capability for numerous applications, such as autonomous driving, mobile robotics, or augmented reality. It remains, however, a challenging task, particularly for large-scale environments and in presence of significant appearance changes. State-of-the-art methods not only struggle with such scenarios, but are often too resource intensive for certain real-time applications. In this paper we propose HF-Net, a hierarchical localization approach based on a monolithic CNN that simultaneously predicts local features and global descriptors for accurate 6-DoF localization. We exploit the coarse-to-fine localization paradigm: we first perform a global retrieval to obtain location hypotheses and only later match local features within those candidate places. This hierarchical approach incurs significant runtime savings and makes our system suitable for real-time operation. By leveraging learned descriptors, our method achieves remarkable localization robustness across large variations of appearance and sets a new state-of-the-art on two challenging benchmarks for large-scale localization.
PDF Abstract CVPR 2019 PDF CVPR 2019 AbstractCode

 Colab
Colab




Datasets
 HPatches
HPatches
 Aachen Day-Night
Aachen Day-Night
 Google Landmarks
Google Landmarks

| Task | Dataset | Model | Metric Name | Metric Value | Global Rank | Benchmark |
|---|---|---|---|---|---|---|
| Visual Place Recognition | Berlin Kudamm | HF-Net | Recall@1 | 46.78 | # 3 |
