Offline Tracking with Object Permanence
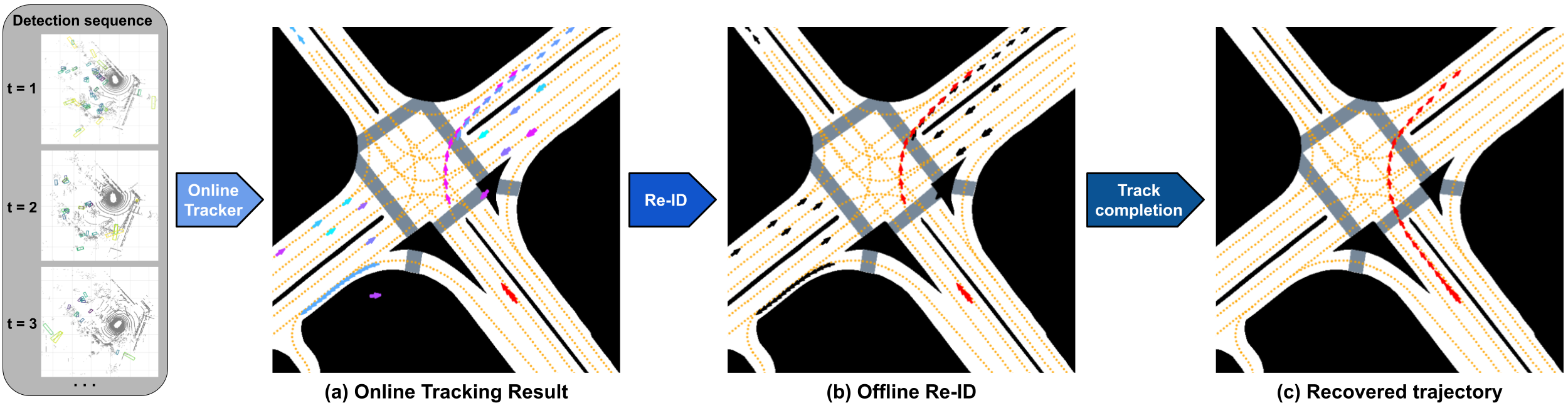
To reduce the expensive labor cost for manual labeling autonomous driving datasets, an alternative is to automatically label the datasets using an offline perception system. However, objects might be temporally occluded. Such occlusion scenarios in the datasets are common yet underexplored in offline auto labeling. In this work, we propose an offline tracking model that focuses on occluded object tracks. It leverages the concept of object permanence which means objects continue to exist even if they are not observed anymore. The model contains three parts: a standard online tracker, a re-identification (Re-ID) module that associates tracklets before and after occlusion, and a track completion module that completes the fragmented tracks. The Re-ID module and the track completion module use the vectorized map as one of the inputs to refine the tracking results with occlusion. The model can effectively recover the occluded object trajectories. It achieves state-of-the-art performance in 3D multi-object tracking by significantly improving the original online tracking result, showing its potential to be applied in offline auto labeling as a useful plugin to improve tracking by recovering occlusions.
PDF Abstract




 nuScenes
nuScenes
