Pillar R-CNN for Point Cloud 3D Object Detection
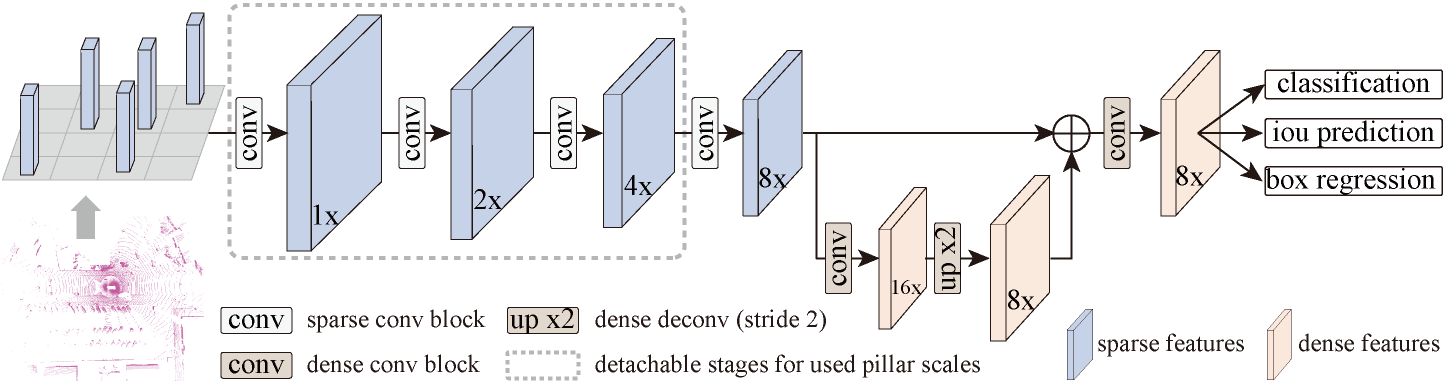
The performance of point cloud 3D object detection hinges on effectively representing raw points, grid-based voxels or pillars. Recent two-stage 3D detectors typically take the point-voxel-based R-CNN paradigm, i.e., the first stage resorts to the 3D voxel-based backbone for 3D proposal generation on bird-eye-view (BEV) representation and the second stage refines them via the intermediate point representation. Their primary mechanisms involve the utilization of intermediary keypoints to restore the substantial 3D structure context from the converted BEV representation. The skilled point-voxel feature interaction, however, makes the entire detection pipeline more complex and compute-intensive. In this paper, we take a different viewpoint -- the pillar-based BEV representation owns sufficient capacity to preserve the 3D structure. In light of the latest advances in BEV-based perception, we devise a conceptually simple yet effective two-stage 3D detection architecture, named Pillar R-CNN. On top of densified BEV feature maps, Pillar R-CNN can easily introduce the feature pyramid architecture to generate 3D proposals at various scales and take the simple 2D R-CNN style detect head for box refinement. Our Pillar R-CNN performs favorably against state-of-the-art 3D detectors on the large-scale Waymo Open Dataset but at a small extra cost. It should be highlighted that further exploration into BEV perception for applications involving autonomous driving is now possible thanks to the effective and elegant Pillar R-CNN architecture.
PDF Abstract




 Waymo Open Dataset
Waymo Open Dataset
