PointDSC: Robust Point Cloud Registration using Deep Spatial Consistency
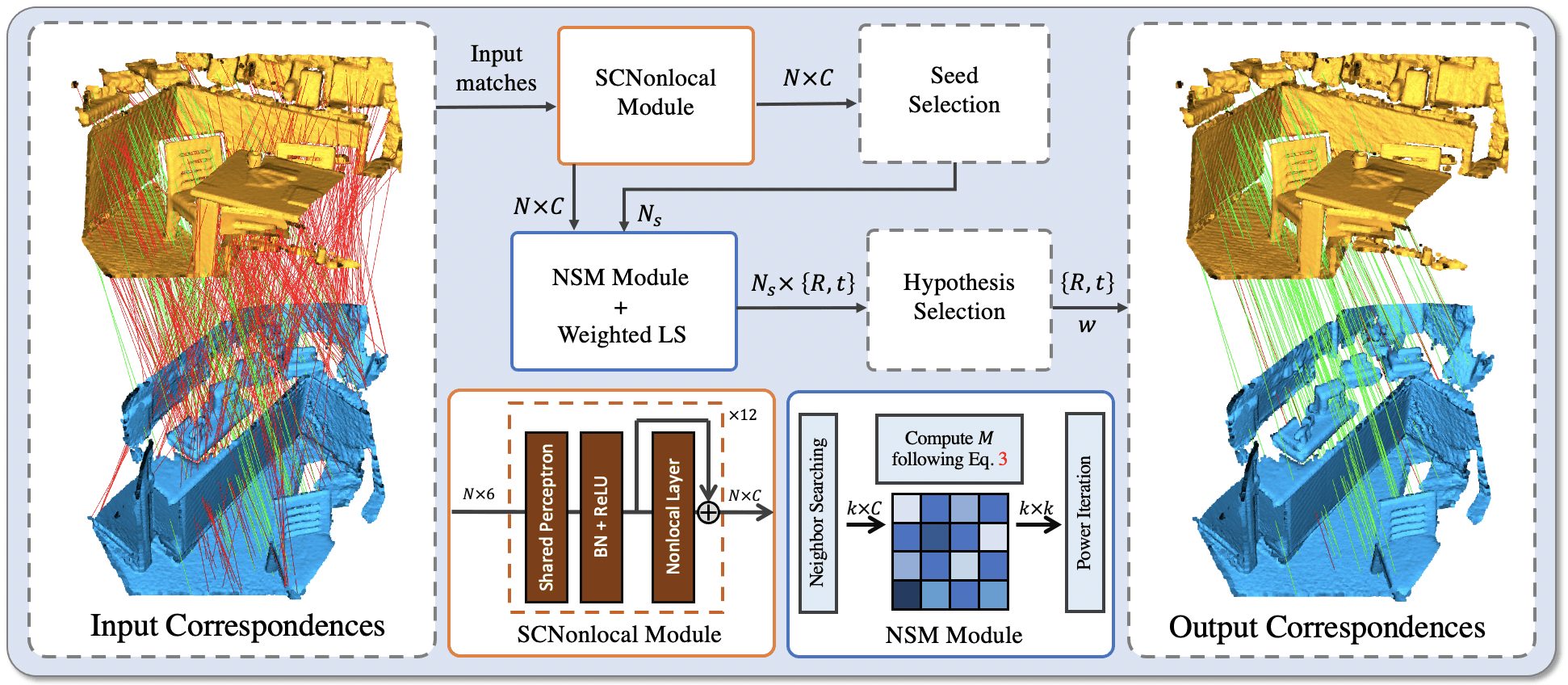
Removing outlier correspondences is one of the critical steps for successful feature-based point cloud registration. Despite the increasing popularity of introducing deep learning methods in this field, spatial consistency, which is essentially established by a Euclidean transformation between point clouds, has received almost no individual attention in existing learning frameworks. In this paper, we present PointDSC, a novel deep neural network that explicitly incorporates spatial consistency for pruning outlier correspondences. First, we propose a nonlocal feature aggregation module, weighted by both feature and spatial coherence, for feature embedding of the input correspondences. Second, we formulate a differentiable spectral matching module, supervised by pairwise spatial compatibility, to estimate the inlier confidence of each correspondence from the embedded features. With modest computation cost, our method outperforms the state-of-the-art hand-crafted and learning-based outlier rejection approaches on several real-world datasets by a significant margin. We also show its wide applicability by combining PointDSC with different 3D local descriptors.
PDF Abstract CVPR 2021 PDF CVPR 2021 Abstract

 KITTI
KITTI
 3DMatch
3DMatch
 FPv1
FPv1

