Revisiting Stereo Depth Estimation From a Sequence-to-Sequence Perspective with Transformers
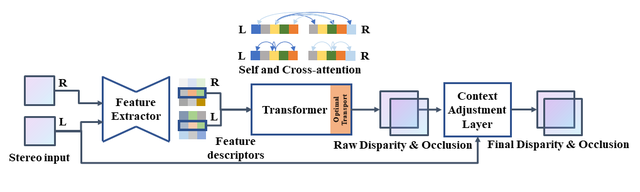
Stereo depth estimation relies on optimal correspondence matching between pixels on epipolar lines in the left and right images to infer depth. In this work, we revisit the problem from a sequence-to-sequence correspondence perspective to replace cost volume construction with dense pixel matching using position information and attention. This approach, named STereo TRansformer (STTR), has several advantages: It 1) relaxes the limitation of a fixed disparity range, 2) identifies occluded regions and provides confidence estimates, and 3) imposes uniqueness constraints during the matching process. We report promising results on both synthetic and real-world datasets and demonstrate that STTR generalizes across different domains, even without fine-tuning.
PDF Abstract ICCV 2021 PDF ICCV 2021 Abstract Colab
Colab



 FlyingThings3D
FlyingThings3D
 MPI Sintel
MPI Sintel
 Middlebury 2014
Middlebury 2014
