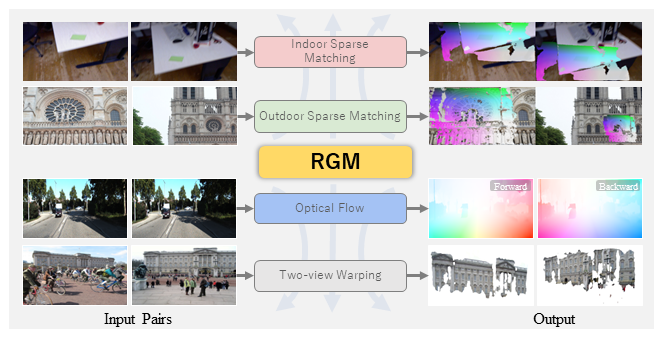
RGM: A Robust Generalizable Matching Model
Finding corresponding pixels within a pair of images is a fundamental computer vision task with various applications. Due to the specific requirements of different tasks like optical flow estimation and local feature matching, previous works are primarily categorized into dense matching and sparse feature matching focusing on specialized architectures along with task-specific datasets, which may somewhat hinder the generalization performance of specialized models. In this paper, we propose a deep model for sparse and dense matching, termed RGM (Robust Generalist Matching). In particular, we elaborately design a cascaded GRU module for refinement by exploring the geometric similarity iteratively at multiple scales following an additional uncertainty estimation module for sparsification. To narrow the gap between synthetic training samples and real-world scenarios, we build a new, large-scale dataset with sparse correspondence ground truth by generating optical flow supervision with greater intervals. As such, we are able to mix up various dense and sparse matching datasets, significantly improving the training diversity. The generalization capacity of our proposed RGM is greatly improved by learning the matching and uncertainty estimation in a two-stage manner on the large, mixed data. Superior performance is achieved for zero-shot matching and downstream geometry estimation across multiple datasets, outperforming the previous methods by a large margin.
PDF Abstract
 ScanNet
ScanNet
 FlyingThings3D
FlyingThings3D
 HPatches
HPatches
 MegaDepth
MegaDepth
