SemARFlow: Injecting Semantics into Unsupervised Optical Flow Estimation for Autonomous Driving
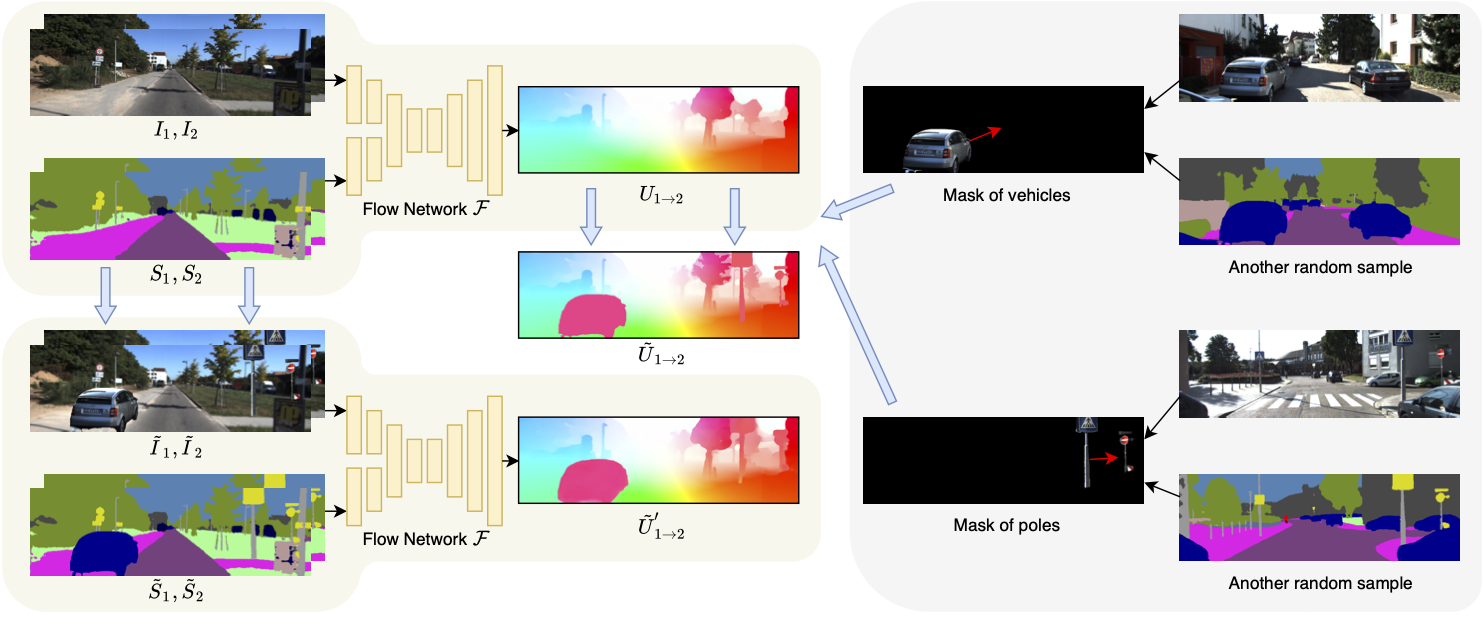
Unsupervised optical flow estimation is especially hard near occlusions and motion boundaries and in low-texture regions. We show that additional information such as semantics and domain knowledge can help better constrain this problem. We introduce SemARFlow, an unsupervised optical flow network designed for autonomous driving data that takes estimated semantic segmentation masks as additional inputs. This additional information is injected into the encoder and into a learned upsampler that refines the flow output. In addition, a simple yet effective semantic augmentation module provides self-supervision when learning flow and its boundaries for vehicles, poles, and sky. Together, these injections of semantic information improve the KITTI-2015 optical flow test error rate from 11.80% to 8.38%. We also show visible improvements around object boundaries as well as a greater ability to generalize across datasets. Code is available at https://github.com/duke-vision/semantic-unsup-flow-release.
PDF Abstract ICCV 2023 PDF ICCV 2023 Abstract



 KITTI
KITTI
