OPV2V
Introduced by Xu et al. in OPV2V: An Open Benchmark Dataset and Fusion Pipeline for Perception with Vehicle-to-Vehicle Communication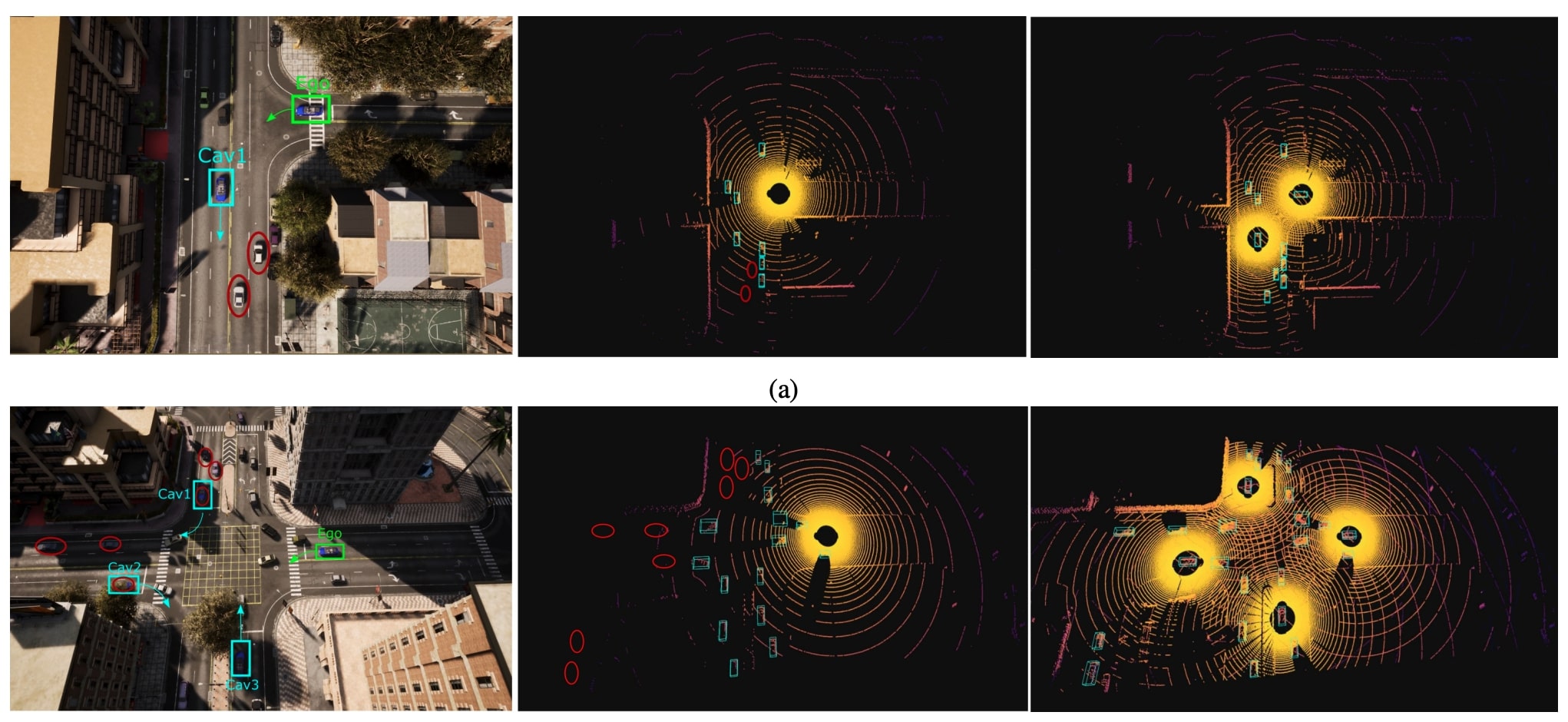
OPV2V is a large-scale open simulated dataset for Vehicle-to-Vehicle perception. It contains over 70 interesting scenes, 11,464 frames, and 232,913 annotated 3D vehicle bounding boxes, collected from 8 towns in CARLA and a digital town of Culver City, Los Angeles.
Benchmarks
| Trend | Task | Dataset Variant | Best Model | Paper | Code |
|---|---|---|---|---|---|

|
OPV2V
|
V2VNet
|
|||

|
OPV2V
|
Where2comm
|
Papers
| Paper | Code | Results | Date | Stars |
|---|
Dataset Loaders
No data loaders found. You can
submit your data loader here.
No data loaders found. You can
submit your data loader here.


