TUM monoVO
Introduced by Engel et al. in A Photometrically Calibrated Benchmark For Monocular Visual Odometry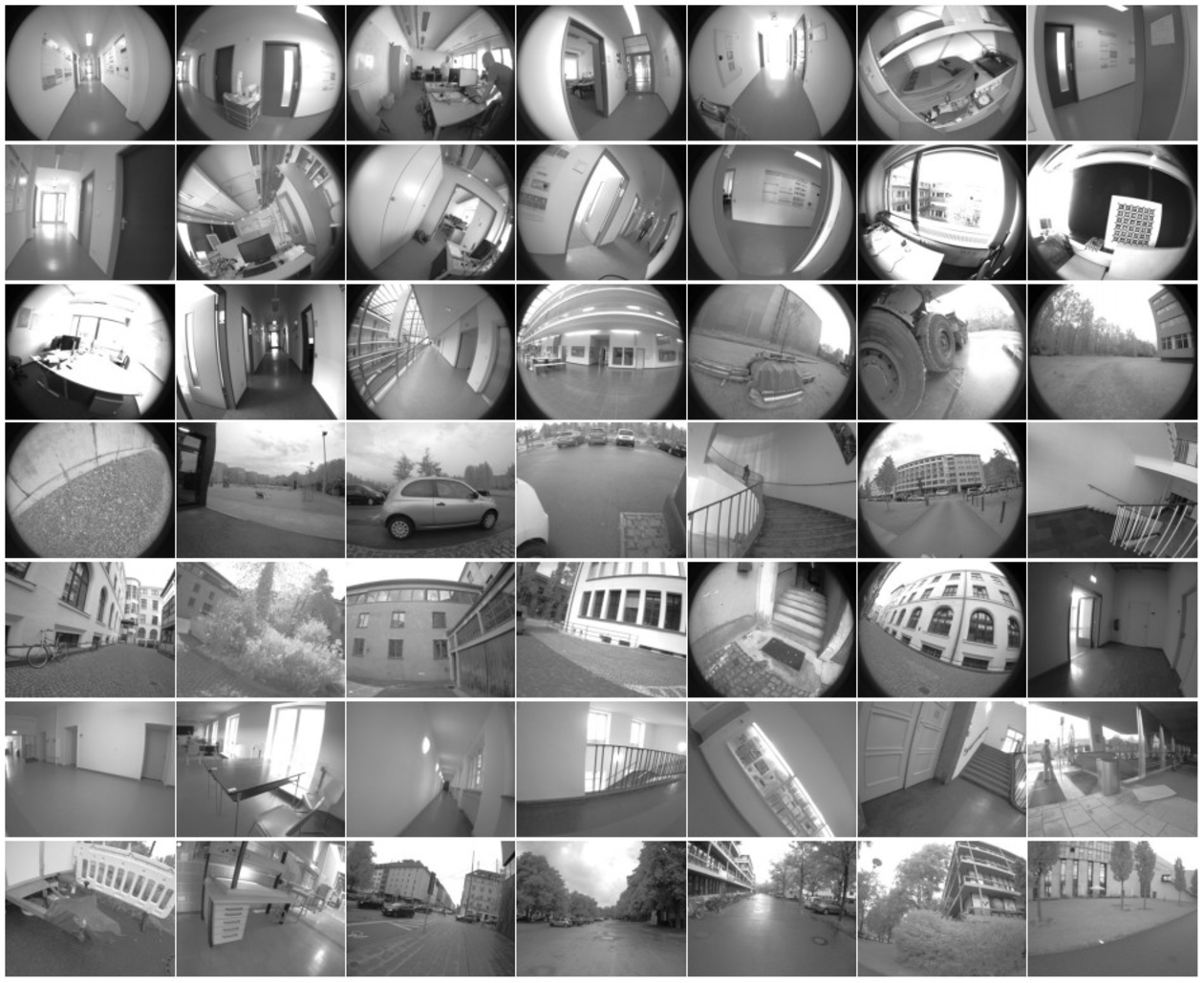
TUM monoVO is a dataset for evaluating the tracking accuracy of monocular Visual Odometry (VO) and SLAM methods. It contains 50 real-world sequences comprising over 100 minutes of video, recorded across different environments – ranging from narrow indoor corridors to wide outdoor scenes. All sequences contain mostly exploring camera motion, starting and ending at the same position: this allows to evaluate tracking accuracy via the accumulated drift from start to end, without requiring ground-truth for the full sequence. In contrast to existing datasets, all sequences are photometrically calibrated: the dataset creators provide the exposure times for each frame as reported by the sensor, the camera response function and the lens attenuation factors (vignetting).
Source: https://vision.in.tum.de/data/datasets/mono-datasetPapers
| Paper | Code | Results | Date | Stars |
|---|


