 Object Detection Models
Object Detection Models
SSD
Introduced by Liu et al. in SSD: Single Shot MultiBox DetectorSSD is a single-stage object detection method that discretizes the output space of bounding boxes into a set of default boxes over different aspect ratios and scales per feature map location. At prediction time, the network generates scores for the presence of each object category in each default box and produces adjustments to the box to better match the object shape. Additionally, the network combines predictions from multiple feature maps with different resolutions to naturally handle objects of various sizes.
The fundamental improvement in speed comes from eliminating bounding box proposals and the subsequent pixel or feature resampling stage. Improvements over competing single-stage methods include using a small convolutional filter to predict object categories and offsets in bounding box locations, using separate predictors (filters) for different aspect ratio detections, and applying these filters to multiple feature maps from the later stages of a network in order to perform detection at multiple scales.
Source: SSD: Single Shot MultiBox Detector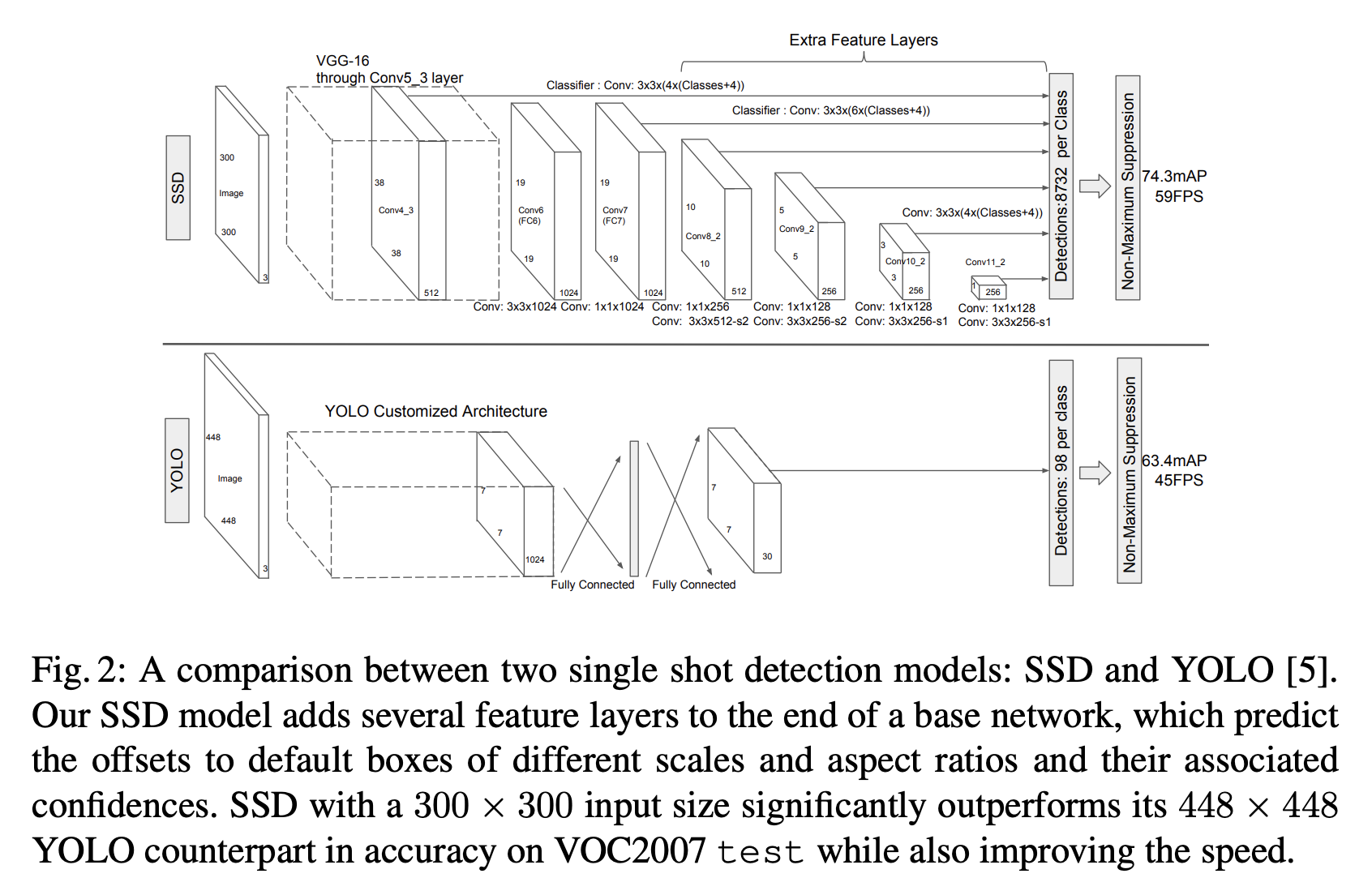
Papers
| Paper | Code | Results | Date | Stars |
|---|
Tasks
| Task | Papers | Share |
|---|---|---|
| Object Detection | 111 | 32.08% |
| Real-Time Object Detection | 15 | 4.34% |
| Pedestrian Detection | 9 | 2.60% |
| General Classification | 8 | 2.31% |
| Classification | 6 | 1.73% |
| Autonomous Driving | 6 | 1.73% |
| 2D Object Detection | 5 | 1.45% |
| Clustering | 5 | 1.45% |
| Reinforcement Learning (RL) | 4 | 1.16% |
Usage Over Time
Components
| Component | Type |
|
|---|---|---|
 1x1 Convolution
1x1 Convolution
|
Convolutions | |
 Convolution
Convolution
|
Convolutions | |
 Non Maximum Suppression
Non Maximum Suppression
|
Proposal Filtering |

