DAIR-V2X: A Large-Scale Dataset for Vehicle-Infrastructure Cooperative 3D Object Detection
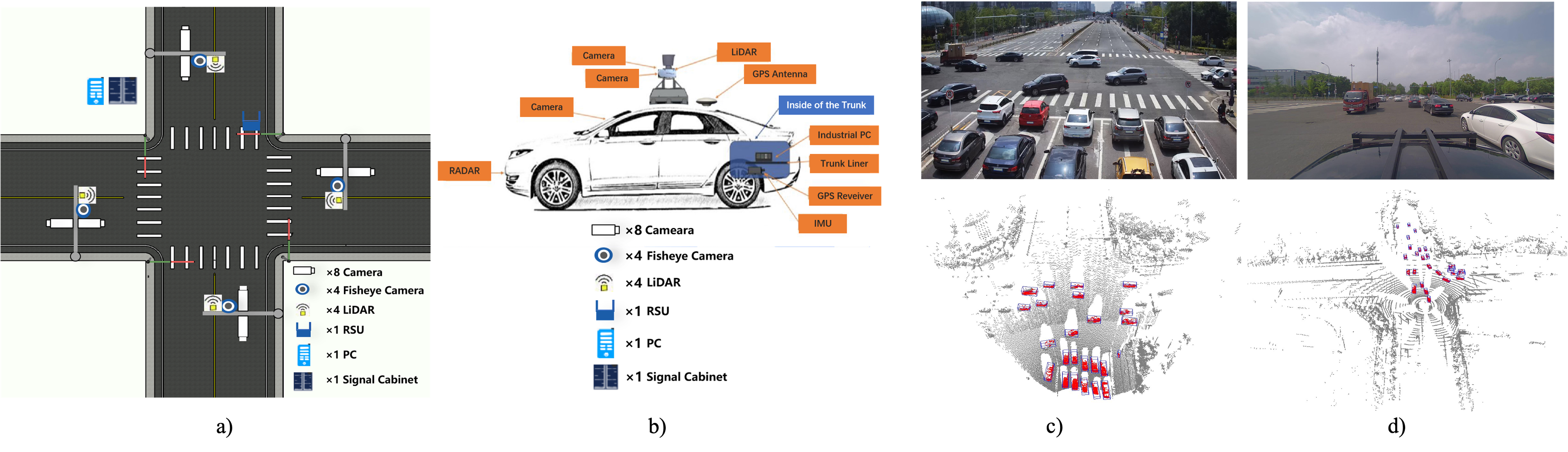
Autonomous driving faces great safety challenges for a lack of global perspective and the limitation of long-range perception capabilities. It has been widely agreed that vehicle-infrastructure cooperation is required to achieve Level 5 autonomy. However, there is still NO dataset from real scenarios available for computer vision researchers to work on vehicle-infrastructure cooperation-related problems. To accelerate computer vision research and innovation for Vehicle-Infrastructure Cooperative Autonomous Driving (VICAD), we release DAIR-V2X Dataset, which is the first large-scale, multi-modality, multi-view dataset from real scenarios for VICAD. DAIR-V2X comprises 71254 LiDAR frames and 71254 Camera frames, and all frames are captured from real scenes with 3D annotations. The Vehicle-Infrastructure Cooperative 3D Object Detection problem (VIC3D) is introduced, formulating the problem of collaboratively locating and identifying 3D objects using sensory inputs from both vehicle and infrastructure. In addition to solving traditional 3D object detection problems, the solution of VIC3D needs to consider the temporal asynchrony problem between vehicle and infrastructure sensors and the data transmission cost between them. Furthermore, we propose Time Compensation Late Fusion (TCLF), a late fusion framework for the VIC3D task as a benchmark based on DAIR-V2X. Find data, code, and more up-to-date information at https://thudair.baai.ac.cn/index and https://github.com/AIR-THU/DAIR-V2X.
PDF Abstract CVPR 2022 PDF CVPR 2022 AbstractCode




Datasets
Introduced in the Paper:
DAIR-V2X