Multi-view Self-supervised Deep Learning for 6D Pose Estimation in the Amazon Picking Challenge
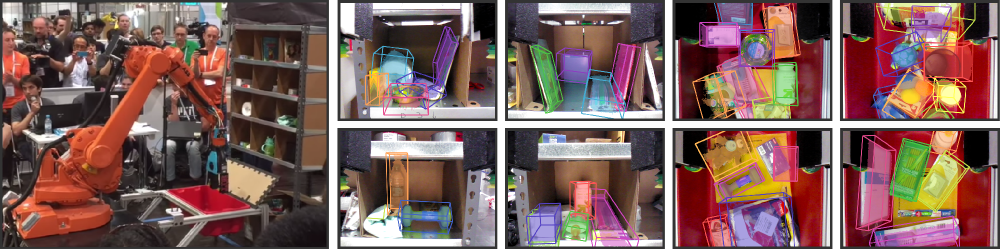
Robot warehouse automation has attracted significant interest in recent years, perhaps most visibly in the Amazon Picking Challenge (APC). A fully autonomous warehouse pick-and-place system requires robust vision that reliably recognizes and locates objects amid cluttered environments, self-occlusions, sensor noise, and a large variety of objects. In this paper we present an approach that leverages multi-view RGB-D data and self-supervised, data-driven learning to overcome those difficulties. The approach was part of the MIT-Princeton Team system that took 3rd- and 4th- place in the stowing and picking tasks, respectively at APC 2016. In the proposed approach, we segment and label multiple views of a scene with a fully convolutional neural network, and then fit pre-scanned 3D object models to the resulting segmentation to get the 6D object pose. Training a deep neural network for segmentation typically requires a large amount of training data. We propose a self-supervised method to generate a large labeled dataset without tedious manual segmentation. We demonstrate that our system can reliably estimate the 6D pose of objects under a variety of scenarios. All code, data, and benchmarks are available at http://apc.cs.princeton.edu/
PDF Abstract



