3D-VisTA: Pre-trained Transformer for 3D Vision and Text Alignment
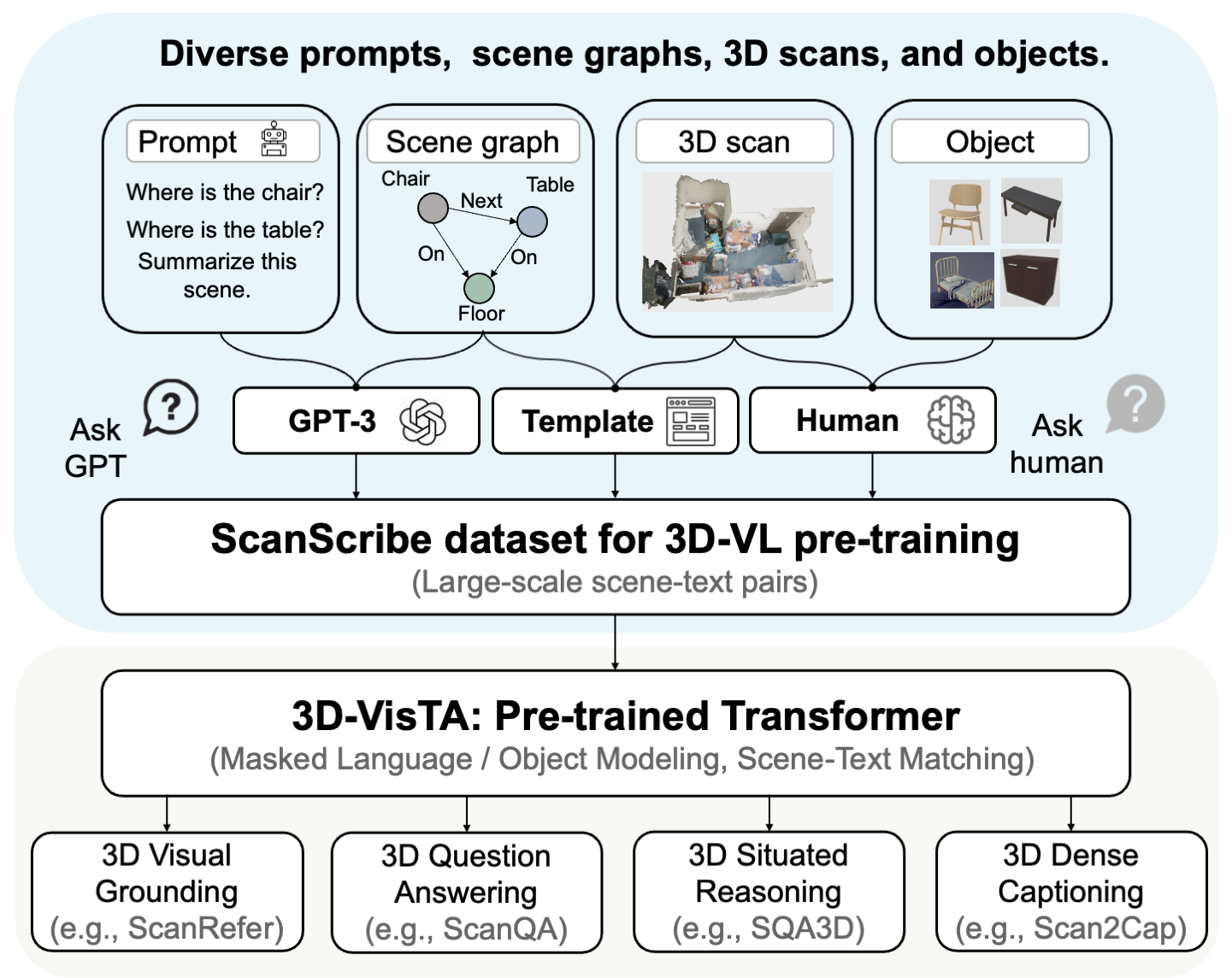
3D vision-language grounding (3D-VL) is an emerging field that aims to connect the 3D physical world with natural language, which is crucial for achieving embodied intelligence. Current 3D-VL models rely heavily on sophisticated modules, auxiliary losses, and optimization tricks, which calls for a simple and unified model. In this paper, we propose 3D-VisTA, a pre-trained Transformer for 3D Vision and Text Alignment that can be easily adapted to various downstream tasks. 3D-VisTA simply utilizes self-attention layers for both single-modal modeling and multi-modal fusion without any sophisticated task-specific design. To further enhance its performance on 3D-VL tasks, we construct ScanScribe, the first large-scale 3D scene-text pairs dataset for 3D-VL pre-training. ScanScribe contains 2,995 RGB-D scans for 1,185 unique indoor scenes originating from ScanNet and 3R-Scan datasets, along with paired 278K scene descriptions generated from existing 3D-VL tasks, templates, and GPT-3. 3D-VisTA is pre-trained on ScanScribe via masked language/object modeling and scene-text matching. It achieves state-of-the-art results on various 3D-VL tasks, ranging from visual grounding and dense captioning to question answering and situated reasoning. Moreover, 3D-VisTA demonstrates superior data efficiency, obtaining strong performance even with limited annotations during downstream task fine-tuning.
PDF Abstract ICCV 2023 PDF ICCV 2023 Abstract Spaces
Spaces




 ScanNet
ScanNet
 Objaverse
Objaverse
 3RScan
3RScan
 SQA3D
SQA3D
