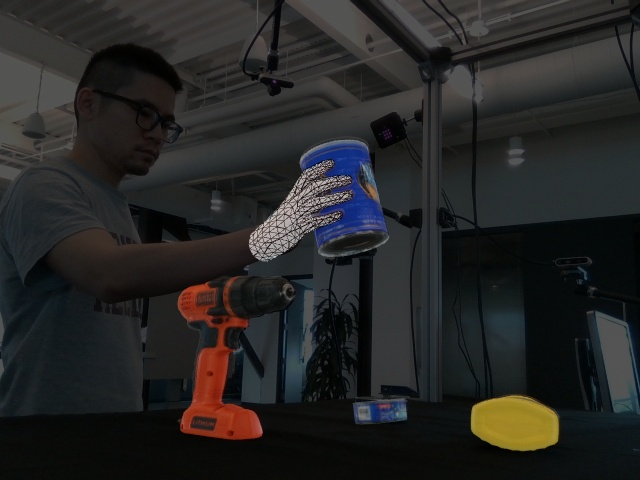
DexYCB: A Benchmark for Capturing Hand Grasping of Objects
We introduce DexYCB, a new dataset for capturing hand grasping of objects. We first compare DexYCB with a related one through cross-dataset evaluation. We then present a thorough benchmark of state-of-the-art approaches on three relevant tasks: 2D object and keypoint detection, 6D object pose estimation, and 3D hand pose estimation. Finally, we evaluate a new robotics-relevant task: generating safe robot grasps in human-to-robot object handover. Dataset and code are available at https://dex-ycb.github.io.
PDF Abstract CVPR 2021 PDF CVPR 2021 Abstract






Datasets
Introduced in the Paper:
 DexYCB
DexYCB
Used in the Paper:
 MS COCO
MS COCO
 YCB-Video
YCB-Video
 HO-3D
HO-3D
 GRAB
GRAB
 InterHand2.6M
InterHand2.6M
 ContactPose
ContactPose
 EgoDexter
EgoDexter
Results from the Paper
Submit
results from this paper
to get state-of-the-art GitHub badges and help the
community compare results to other papers.
Methods
No methods listed for this paper. Add
relevant methods here
