BusyBot: Learning to Interact, Reason, and Plan in a BusyBoard Environment
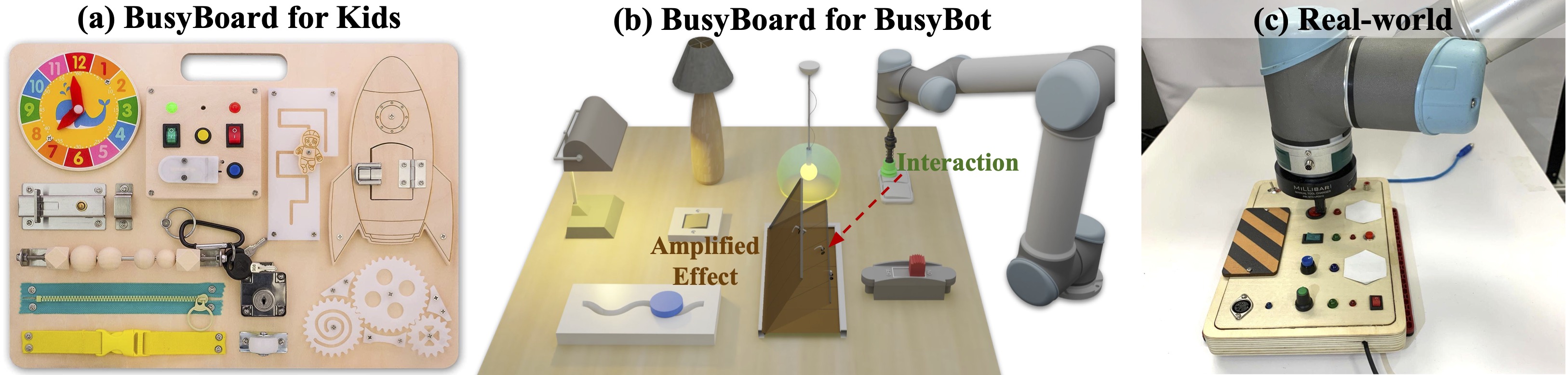
We introduce BusyBoard, a toy-inspired robot learning environment that leverages a diverse set of articulated objects and inter-object functional relations to provide rich visual feedback for robot interactions. Based on this environment, we introduce a learning framework, BusyBot, which allows an agent to jointly acquire three fundamental capabilities (interaction, reasoning, and planning) in an integrated and self-supervised manner. With the rich sensory feedback provided by BusyBoard, BusyBot first learns a policy to efficiently interact with the environment; then with data collected using the policy, BusyBot reasons the inter-object functional relations through a causal discovery network; and finally by combining the learned interaction policy and relation reasoning skill, the agent is able to perform goal-conditioned manipulation tasks. We evaluate BusyBot in both simulated and real-world environments, and validate its generalizability to unseen objects and relations. Video is available at https://youtu.be/EJ98xBJZ9ek.
PDF Abstract


 AI2-THOR
AI2-THOR
