Image-to-Image Translation
491 papers with code • 37 benchmarks • 29 datasets
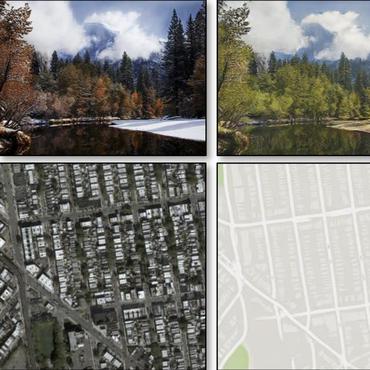
Image-to-Image Translation is a task in computer vision and machine learning where the goal is to learn a mapping between an input image and an output image, such that the output image can be used to perform a specific task, such as style transfer, data augmentation, or image restoration.
( Image credit: Unpaired Image-to-Image Translation using Cycle-Consistent Adversarial Networks )

Benchmarks
These leaderboards are used to track progress in Image-to-Image Translation
| Trend | Dataset | Best Model | Paper | Code | Compare |
|---|---|---|---|---|---|
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
Libraries
Use these libraries to find Image-to-Image Translation models and implementationsDatasets
 Cityscapes
Cityscapes
 KITTI
KITTI
 ADE20K
ADE20K
 CelebA-HQ
CelebA-HQ
 SYNTHIA
SYNTHIA
 GTA5
GTA5
 DeepFashion
DeepFashion
 Perceptual Similarity
Perceptual Similarity
 COCO-Stuff
COCO-Stuff
 AFHQ
AFHQ
Subtasks




Most implemented papers
Deep Residual Learning for Image Recognition
tensorflow/models
•
 •
CVPR 2016
•
CVPR 2016
Deep residual nets are foundations of our submissions to ILSVRC & COCO 2015 competitions, where we also won the 1st places on the tasks of ImageNet detection, ImageNet localization, COCO detection, and COCO segmentation.
Unpaired Image-to-Image Translation using Cycle-Consistent Adversarial Networks
junyanz/pytorch-CycleGAN-and-pix2pix
•
 •
ICCV 2017
•
ICCV 2017
Image-to-image translation is a class of vision and graphics problems where the goal is to learn the mapping between an input image and an output image using a training set of aligned image pairs.
Image-to-Image Translation with Conditional Adversarial Networks
phillipi/pix2pix
•
 •
CVPR 2017
•
CVPR 2017
We investigate conditional adversarial networks as a general-purpose solution to image-to-image translation problems.
StarGAN: Unified Generative Adversarial Networks for Multi-Domain Image-to-Image Translation
eriklindernoren/PyTorch-GAN
•
•
CVPR 2018
To address this limitation, we propose StarGAN, a novel and scalable approach that can perform image-to-image translations for multiple domains using only a single model.
U-GAT-IT: Unsupervised Generative Attentional Networks with Adaptive Layer-Instance Normalization for Image-to-Image Translation
We propose a novel method for unsupervised image-to-image translation, which incorporates a new attention module and a new learnable normalization function in an end-to-end manner.
Semantic Image Synthesis with Spatially-Adaptive Normalization
Previous methods directly feed the semantic layout as input to the deep network, which is then processed through stacks of convolution, normalization, and nonlinearity layers.
High-Resolution Image Synthesis and Semantic Manipulation with Conditional GANs
NVIDIA/pix2pixHD
•
•
CVPR 2018
We present a new method for synthesizing high-resolution photo-realistic images from semantic label maps using conditional generative adversarial networks (conditional GANs).
Multimodal Unsupervised Image-to-Image Translation
To translate an image to another domain, we recombine its content code with a random style code sampled from the style space of the target domain.
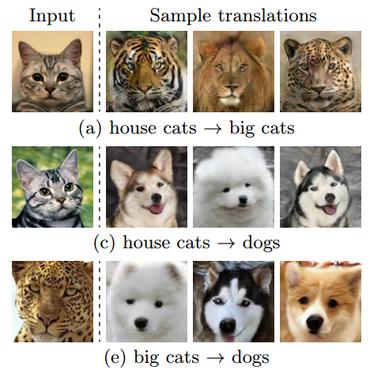
StarGAN v2: Diverse Image Synthesis for Multiple Domains
clovaai/stargan-v2
•
•
CVPR 2020
A good image-to-image translation model should learn a mapping between different visual domains while satisfying the following properties: 1) diversity of generated images and 2) scalability over multiple domains.
Everybody Dance Now
carolineec/EverybodyDanceNow
•
•
ICCV 2019
This paper presents a simple method for "do as I do" motion transfer: given a source video of a person dancing, we can transfer that performance to a novel (amateur) target after only a few minutes of the target subject performing standard moves.
