Search Results for author:
Found 12 papers, 2 papers with code
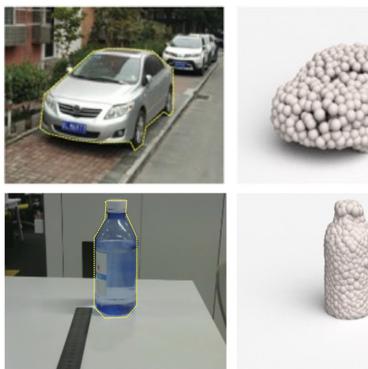
TripoSR: Fast 3D Object Reconstruction from a Single Image
This technical report introduces TripoSR, a 3D reconstruction model leveraging transformer architecture for fast feed-forward 3D generation, producing 3D mesh from a single image in under 0. 5 seconds.
 3D Generation
3D Generation
 3D Object Reconstruction From A Single Image
+2
3D Object Reconstruction From A Single Image
+2
Properties of Immersions for Systems with Multiple Limit Sets with Implications to Learning Koopman Embeddings
Linear immersions (or Koopman eigenmappings) of a nonlinear system have wide applications in prediction and control.
UniDream: Unifying Diffusion Priors for Relightable Text-to-3D Generation
Recent advancements in text-to-3D generation technology have significantly advanced the conversion of textual descriptions into imaginative well-geometrical and finely textured 3D objects.
On the Hardness of Learning to Stabilize Linear Systems
Inspired by the work of Tsiamis et al. \cite{tsiamis2022learning}, in this paper we study the statistical hardness of learning to stabilize linear time-invariant systems.
UniG3D: A Unified 3D Object Generation Dataset
However, the quality and diversity of existing 3D object generation methods are constrained by the inadequacies of existing 3D object datasets, including issues related to text quality, the incompleteness of multi-modal data representation encompassing 2D rendered images and 3D assets, as well as the size of the dataset.

Koopman-inspired Implicit Backward Reachable Sets for Unknown Nonlinear Systems
Koopman liftings have been successfully used to learn high dimensional linear approximations for autonomous systems for prediction purposes, or for control systems for leveraging linear control techniques to control nonlinear dynamics.
Quantifying the Value of Preview Information for Safety Control
Safety-critical systems, such as autonomous vehicles, often incorporate perception modules that can anticipate upcoming disturbances to system dynamics, expecting that such preview information can improve the performance and safety of the system in complex and uncertain environments.

Linear Video Transformer with Feature Fixation
Therefore, we propose a feature fixation module to reweight the feature importance of the query and key before computing linear attention.
Neural Architecture Search on Efficient Transformers and Beyond
To address this issue, we propose a new framework to find optimal architectures for efficient Transformers with the neural architecture search (NAS) technique.

On the Convergence of the Backward Reachable Sets of Robust Controlled Invariant Sets For Discrete-time Linear Systems
This paper considers discrete-time linear systems with bounded additive disturbances, and studies the convergence properties of the backward reachable sets of robust controlled invariant sets (RCIS).
Automaton-based Implicit Controlled Invariant Set Computation for Discrete-Time Linear Systems
In this paper, we derive closed-form expressions for implicit controlled invariant sets for discrete-time controllable linear systems with measurable disturbances.
On the Value of Preview Information For Safety Control
However, little work has been done for analyzing the value of preview information for safety control for systems with continuous state spaces.
