Search Results for author:
Found 38 papers, 10 papers with code
3DBench: A Scalable 3D Benchmark and Instruction-Tuning Dataset
Evaluating the performance of Multi-modal Large Language Models (MLLMs), integrating both point cloud and language, presents significant challenges.
Foundation Model assisted Weakly Supervised LiDAR Semantic Segmentation
Furthermore, to mitigate the influence of erroneous pseudo labels obtained from sparse annotations on point cloud features, we propose a multi-modal weakly supervised network for LiDAR semantic segmentation, called MM-ScatterNet.

Taming Stable Diffusion for Text to 360° Panorama Image Generation
Generative models, e. g., Stable Diffusion, have enabled the creation of photorealistic images from text prompts.


GVGEN: Text-to-3D Generation with Volumetric Representation
To simplify the generation of GaussianVolume and empower the model to generate instances with detailed 3D geometry, we propose a coarse-to-fine pipeline.

THOR: Text to Human-Object Interaction Diffusion via Relation Intervention
This paper addresses new methodologies to deal with the challenging task of generating dynamic Human-Object Interactions from textual descriptions (Text2HOI).
NeRF-Det++: Incorporating Semantic Cues and Perspective-aware Depth Supervision for Indoor Multi-View 3D Detection
We project the freely available 3D segmentation annotations onto the 2D plane and leverage the corresponding 2D semantic maps as the supervision signal, significantly enhancing the semantic awareness of multi-view detectors.

A Comprehensive Survey on 3D Content Generation
Recent years have witnessed remarkable advances in artificial intelligence generated content(AIGC), with diverse input modalities, e. g., text, image, video, audio and 3D.
3DAxiesPrompts: Unleashing the 3D Spatial Task Capabilities of GPT-4V
In this work, we present a new visual prompting method called 3DAxiesPrompts (3DAP) to unleash the capabilities of GPT-4V in performing 3D spatial tasks.

UniDream: Unifying Diffusion Priors for Relightable Text-to-3D Generation
Recent advancements in text-to-3D generation technology have significantly advanced the conversion of textual descriptions into imaginative well-geometrical and finely textured 3D objects.
PCRDiffusion: Diffusion Probabilistic Models for Point Cloud Registration
We propose a new framework that formulates point cloud registration as a denoising diffusion process from noisy transformation to object transformation.
Zero-Shot Point Cloud Registration
The cornerstone of ZeroReg is the novel transfer of image features from keypoints to the point cloud, enriched by aggregating information from 3D geometric neighborhoods.
A Conditional Denoising Diffusion Probabilistic Model for Point Cloud Upsampling
Most of the existing point cloud upsampling methods focus on sparse point cloud feature extraction and upsampling module design.
Point Cloud Pre-training with Diffusion Models
This generator aggregates the features extracted by the backbone and employs them as the condition to guide the point-to-point recovery from the noisy point cloud, thereby assisting the backbone in capturing both local and global geometric priors as well as the global point density distribution of the object.
Experts Weights Averaging: A New General Training Scheme for Vision Transformers
As Vision Transformers (ViTs) are gradually surpassing CNNs in various visual tasks, one may question: if a training scheme specifically for ViTs exists that can also achieve performance improvement without increasing inference cost?
UniG3D: A Unified 3D Object Generation Dataset
However, the quality and diversity of existing 3D object generation methods are constrained by the inadequacies of existing 3D object datasets, including issues related to text quality, the incompleteness of multi-modal data representation encompassing 2D rendered images and 3D assets, as well as the size of the dataset.

LAMM: Language-Assisted Multi-Modal Instruction-Tuning Dataset, Framework, and Benchmark
To the best of our knowledge, we present one of the very first open-source endeavors in the field, LAMM, encompassing a Language-Assisted Multi-Modal instruction tuning dataset, framework, and benchmark.
Cross-source Point Cloud Registration: Challenges, Progress and Prospects
The emerging topic of cross-source point cloud (CSPC) registration has attracted increasing attention with the fast development background of 3D sensor technologies.
Unsupervised Deep Probabilistic Approach for Partial Point Cloud Registration
Deep point cloud registration methods face challenges to partial overlaps and rely on labeled data.
3D Point Cloud Pre-training with Knowledge Distillation from 2D Images
The recent success of pre-trained 2D vision models is mostly attributable to learning from large-scale datasets.
EPCL: Frozen CLIP Transformer is An Efficient Point Cloud Encoder
These token embeddings are concatenated with a task token and fed into the frozen CLIP transformer to learn point cloud representation.
Boosting Semi-Supervised 3D Object Detection with Semi-Sampling
When training a teacher-student semi-supervised framework, we randomly select gt samples and pseudo samples to both labeled frames and unlabeled frames, making a strong data augmentation for them.

Multimodal Learning for Non-small Cell Lung Cancer Prognosis
This paper focuses on the task of survival time analysis for lung cancer.

GMF: General Multimodal Fusion Framework for Correspondence Outlier Rejection
In this paper, we propose General Multimodal Fusion (GMF) to learn to reject the correspondence outliers by leveraging both the structure and texture information.
CLIP2Point: Transfer CLIP to Point Cloud Classification with Image-Depth Pre-training
To address this issue, we propose CLIP2Point, an image-depth pre-training method by contrastive learning to transfer CLIP to the 3D domain, and adapt it to point cloud classification.
 Ranked #3 on
Training-free 3D Point Cloud Classification
on ScanObjectNN
(using extra training data)
Ranked #3 on
Training-free 3D Point Cloud Classification
on ScanObjectNN
(using extra training data)

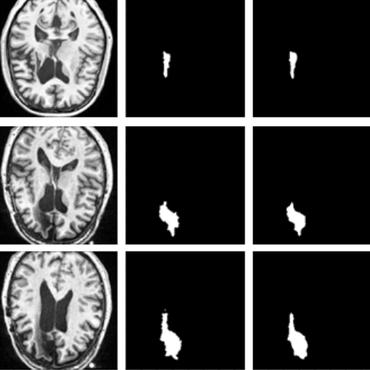
Beyond CNNs: Exploiting Further Inherent Symmetries in Medical Image Segmentation
Automatic tumor or lesion segmentation is a crucial step in medical image analysis for computer-aided diagnosis.
COTReg:Coupled Optimal Transport based Point Cloud Registration
Generating a set of high-quality correspondences or matches is one of the most critical steps in point cloud registration.
GenReg: Deep Generative Method for Fast Point Cloud Registration
To solve this challenge, we propose a new data-driven registration algorithm by investigating deep generative neural networks to point cloud registration.
IMFNet: Interpretable Multimodal Fusion for Point Cloud Registration
In this paper, we propose a new multimodal fusion method to generate a point cloud registration descriptor by considering both structure and texture information.
 Ranked #1 on
Point Cloud Registration
on 3DMatch Benchmark
(using extra training data)
Ranked #1 on
Point Cloud Registration
on 3DMatch Benchmark
(using extra training data)
DeepMMSA: A Novel Multimodal Deep Learning Method for Non-small Cell Lung Cancer Survival Analysis
To improve the survival prediction accuracy and help prognostic decision-making in clinical practice for medical experts, we for the first time propose a multimodal deep learning method for non-small cell lung cancer (NSCLC) survival analysis, named DeepMMSA.
A comprehensive survey on point cloud registration
This survey conducts a comprehensive survey, including both same-source and cross-source registration methods, and summarize the connections between optimization-based and deep learning methods, to provide further research insight.
Causal Discovery from Incomplete Data using An Encoder and Reinforcement Learning
Compared with the direct combination of data imputation and causal discovery methods, our method performs generally better and can even obtain a performance gain as much as 43. 2%.


Jointly Modeling Intra- and Inter-transaction Dependencies with Hierarchical Attentive Transaction Embeddings for Next-item Recommendation
Most existing TBRSs recommend next item by only modeling the intra-transaction dependency within the current transaction while ignoring inter-transaction dependency with recent transactions that may also affect the next item.

Beyond CNNs: Exploiting Further Inherent Symmetries in Medical Images for Segmentation
To mitigate this shortcoming, we propose a novel group equivariant segmentation framework by encoding those inherent symmetries for learning more precise representations.

Feature-metric Registration: A Fast Semi-supervised Approach for Robust Point Cloud Registration without Correspondences
We present a fast feature-metric point cloud registration framework, which enforces the optimisation of registration by minimising a feature-metric projection error without correspondences.
Fast Registration for cross-source point clouds by using weak regional affinity and pixel-wise refinement
Accurate and fast registration of cross-source 3D point clouds from different sensors is an emerged research problem in computer vision.
Learning a 3D descriptor for cross-source point cloud registration from synthetic data
As the development of 3D sensors, registration of 3D data (e. g. point cloud) coming from different kind of sensor is dispensable and shows great demanding.
A coarse-to-fine algorithm for registration in 3D street-view cross-source point clouds
In this paper, different from previous ICP-based methods, and from a statistic view, we propose a effective coarse-to-fine algorithm to detect and register a small scale SFM point cloud in a large scale Lidar point cloud.
A Systematic Approach for Cross-source Point Cloud Registration by Preserving Macro and Micro Structures
We propose a systematic approach for registering cross-source point clouds.
