3D Point Capsule Networks
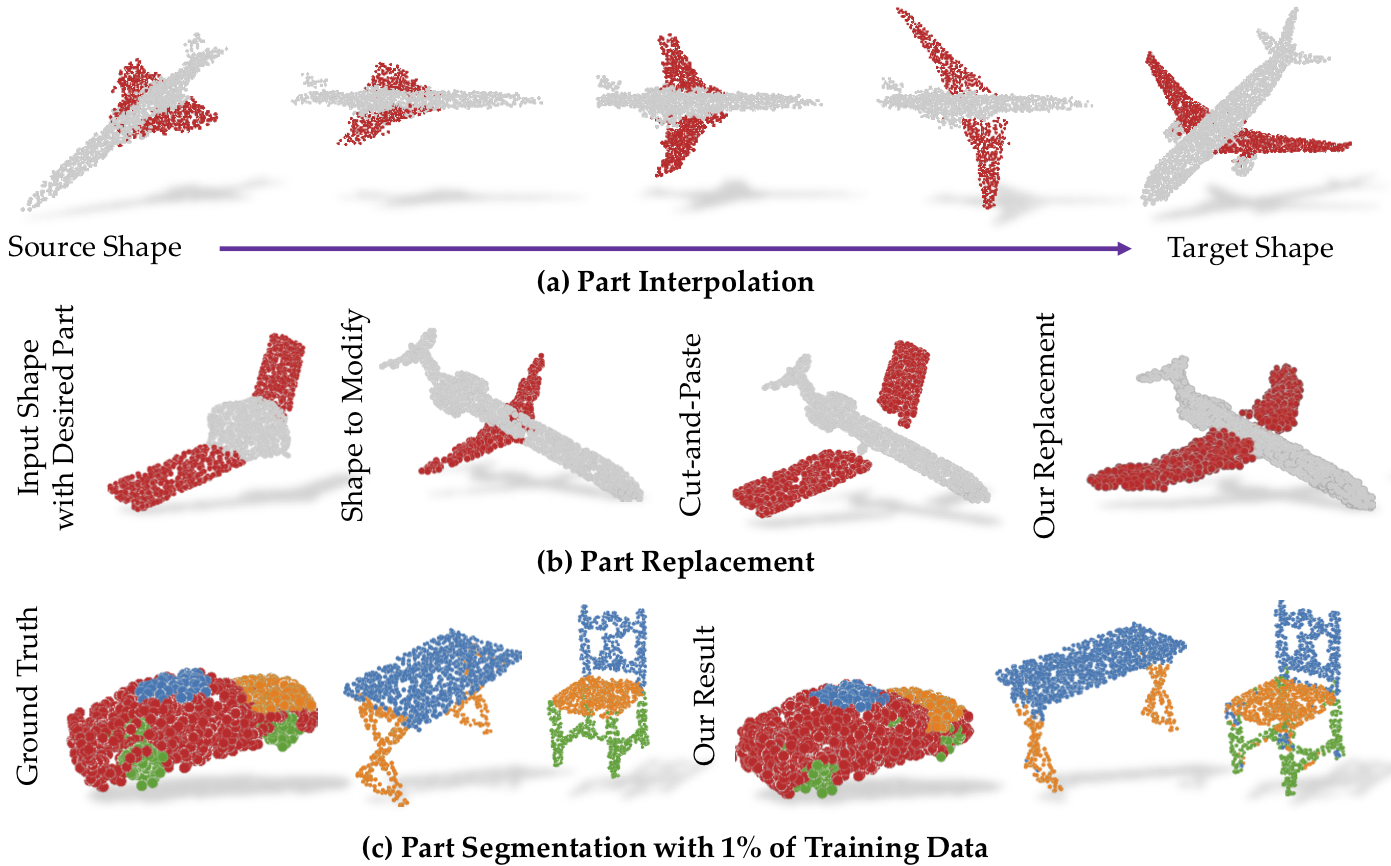
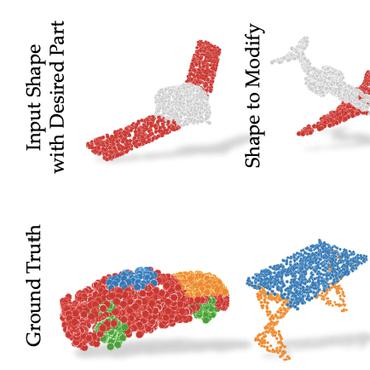
In this paper, we propose 3D point-capsule networks, an auto-encoder designed to process sparse 3D point clouds while preserving spatial arrangements of the input data. 3D capsule networks arise as a direct consequence of our novel unified 3D auto-encoder formulation. Their dynamic routing scheme and the peculiar 2D latent space deployed by our approach bring in improvements for several common point cloud-related tasks, such as object classification, object reconstruction and part segmentation as substantiated by our extensive evaluations. Moreover, it enables new applications such as part interpolation and replacement.
PDF Abstract CVPR 2019 PDF CVPR 2019 Abstract








Datasets
 ShapeNet
ShapeNet
 ModelNet
ModelNet
 ShapeNetCore
ShapeNetCore
 3DMatch
3DMatch

Methods
No methods listed for this paper. Add
relevant methods here
