VDD: Varied Drone Dataset for Semantic Segmentation
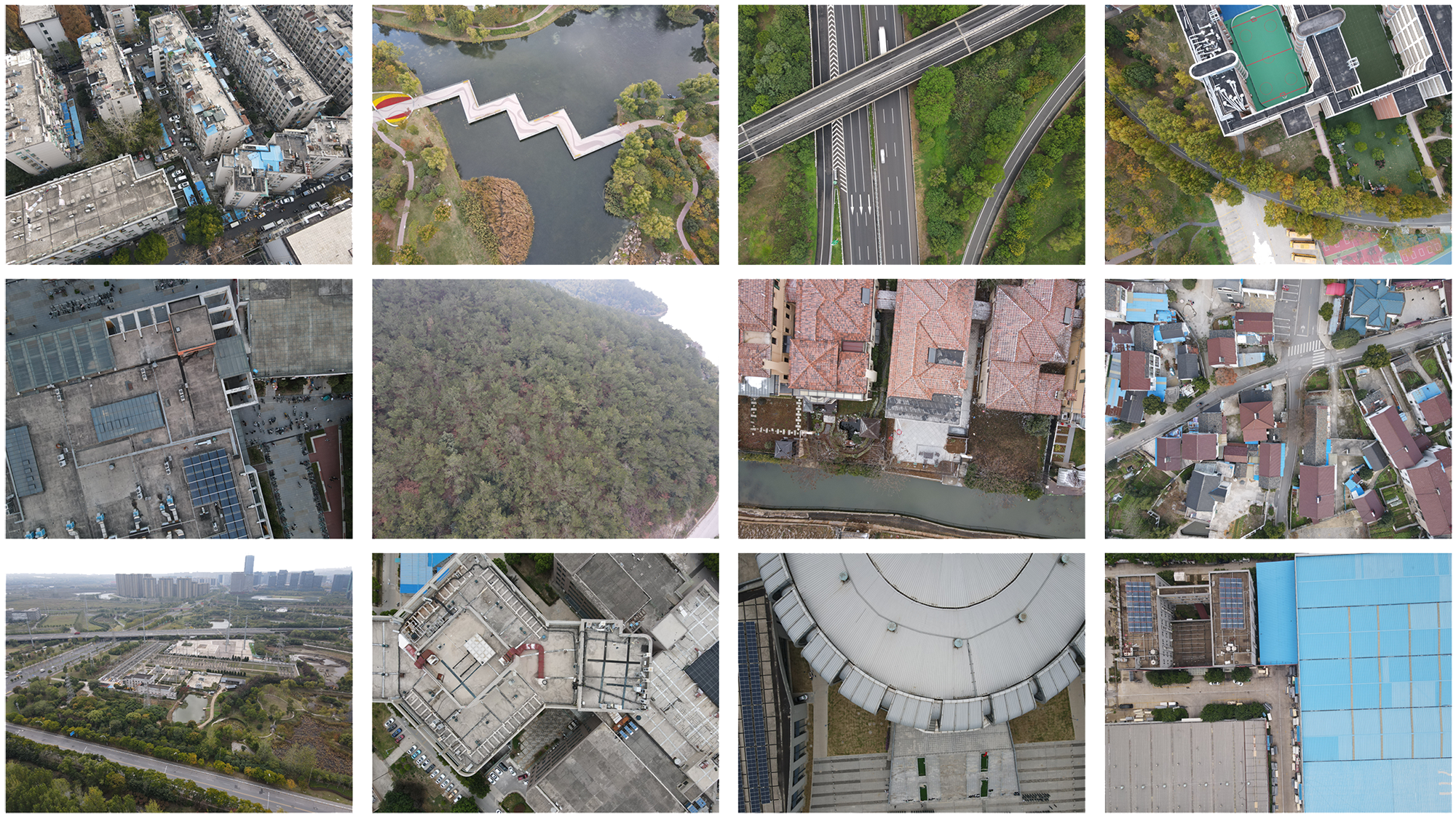
Semantic segmentation of drone images is critical to many aerial vision tasks as it provides essential semantic details that can compensate for the lack of depth information from monocular cameras. However, maintaining high accuracy of semantic segmentation models for drones requires diverse, large-scale, and high-resolution datasets, which are rare in the field of aerial image processing. Existing datasets are typically small and focus primarily on urban scenes, neglecting rural and industrial areas. Models trained on such datasets are not sufficiently equipped to handle the variety of inputs seen in drone imagery. In the VDD-Varied Drone Dataset, we offer a large-scale and densely labeled dataset comprising 400 high-resolution images that feature carefully chosen scenes, camera angles, and varied light and weather conditions. Furthermore, we have adapted existing drone datasets to conform to our annotation standards and integrated them with VDD to create a dataset 1.5 times the size of fine annotation of Cityscapes. We have developed a novel DeepLabT model, which combines CNN and Transformer backbones, to provide a reliable baseline for semantic segmentation in drone imagery. Our experiments indicate that DeepLabT performs admirably on VDD and other drone datasets. We expect that our dataset will generate considerable interest in drone image segmentation and serve as a foundation for other drone vision tasks. VDD is freely available on our website at https://vddvdd.com .
PDF Abstract

Datasets
Introduced in the Paper:
 VDD
Integrated Drone Dataset for Semantic Segmentation
VDD
Integrated Drone Dataset for Semantic Segmentation
Used in the Paper:
 Cityscapes
Cityscapes
 LabelMe
LabelMe
 UAVid
UAVid
