Search Results for author:
Found 5 papers, 5 papers with code
Lie Neurons: Adjoint-Equivariant Neural Networks for Semisimple Lie Algebras
This paper proposes an equivariant neural network that takes data in any semi-simple Lie algebra as input.

A New Framework for Registration of Semantic Point Clouds from Stereo and RGB-D Cameras
This paper reports on a novel nonparametric rigid point cloud registration framework that jointly integrates geometric and semantic measurements such as color or semantic labels into the alignment process and does not require explicit data association.
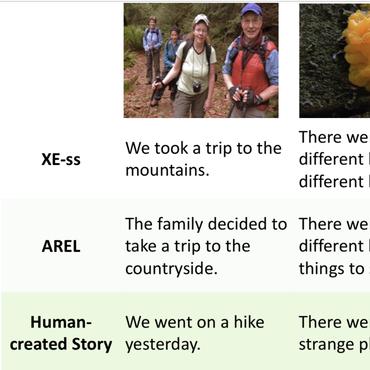
Knowledge-Enriched Visual Storytelling
This paper introduces KG-Story, a three-stage framework that allows the story generation model to take advantage of external Knowledge Graphs to produce interesting stories.
A Keyframe-based Continuous Visual SLAM for RGB-D Cameras via Nonparametric Joint Geometric and Appearance Representation
The experimental evaluations using publicly available RGB-D benchmarks show that the developed keyframe selection technique using continuous visual odometry outperforms its robust dense (and direct) visual odometry equivalent.
Adaptive Continuous Visual Odometry from RGB-D Images
In this paper, we extend the recently developed continuous visual odometry framework for RGB-D cameras to an adaptive framework via online hyperparameter learning.
