Search Results for author:
Found 12 papers, 6 papers with code
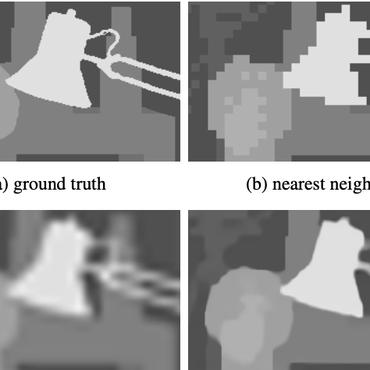
A Deep Primal-Dual Network for Guided Depth Super-Resolution
In this paper we present a novel method to increase the spatial resolution of depth images.


ATGV-Net: Accurate Depth Super-Resolution
We demonstrate that it is feasible to train our method solely on synthetic data that we generate in large quantities for this task.

Filament and Flare Detection in Hα image sequences
The information produced by our method can be used for near real-time alerts and the statistical analysis of existing data by solar physicists.
Conditioned Regression Models for Non-Blind Single Image Super-Resolution
However, this setting is not realistic for practical applications, because the blur is typically different for each test image.
Connecting the Dots: Learning Representations for Active Monocular Depth Estimation
We propose a technique for depth estimation with a monocular structured-light camera, i. e., a calibrated stereo set-up with one camera and one laser projector.

$α$Surf: Implicit Surface Reconstruction for Semi-Transparent and Thin Objects with Decoupled Geometry and Opacity
While neural radiance field (NeRF) based methods can model semi-transparency and achieve photo-realistic quality in synthesized novel views, their volumetric geometry representation tightly couples geometry and opacity, and therefore cannot be easily converted into surfaces without introducing artifacts.
Efficiently Creating 3D Training Data for Fine Hand Pose Estimation
While many recent hand pose estimation methods critically rely on a training set of labelled frames, the creation of such a dataset is a challenging task that has been overlooked so far.

OctNetFusion: Learning Depth Fusion from Data
In this paper, we present a learning based approach to depth fusion, i. e., dense 3D reconstruction from multiple depth images.

Stable View Synthesis
The core of SVS is view-dependent on-surface feature aggregation, in which directional feature vectors at each 3D point are processed to produce a new feature vector for a ray that maps this point into the new target view.
Free View Synthesis
We present a method for novel view synthesis from input images that are freely distributed around a scene.

OctNet: Learning Deep 3D Representations at High Resolutions
We present OctNet, a representation for deep learning with sparse 3D data.


NeRF++: Analyzing and Improving Neural Radiance Fields
Neural Radiance Fields (NeRF) achieve impressive view synthesis results for a variety of capture settings, including 360 capture of bounded scenes and forward-facing capture of bounded and unbounded scenes.
