Search Results for author:
Found 16 papers, 7 papers with code
Deep Instance Segmentation and Visual Servoing to Play Jenga with a Cost-Effective Robotic System
A Jenga game round undoubtedly embeds many traits of complex industrial or surgical manipulation tasks, requiring a multi-step strategy, the combination of visual and tactile data, and the highly precise motion of the robotic arm to perform a single block extraction.


Generative Adversarial Super-Resolution at the Edge with Knowledge Distillation
Single-Image Super-Resolution can support robotic tasks in environments where a reliable visual stream is required to monitor the mission, handle teleoperation or study relevant visual details.


Ultra-low-power Range Error Mitigation for Ultra-wideband Precise Localization
Precise and accurate localization in outdoor and indoor environments is a challenging problem that currently constitutes a significant limitation for several practical applications.
Back-to-Bones: Rediscovering the Role of Backbones in Domain Generalization
Domain Generalization (DG) studies the capability of a deep learning model to generalize to out-of-training distributions.

Position-Agnostic Autonomous Navigation in Vineyards with Deep Reinforcement Learning
Precision agriculture is rapidly attracting research to efficiently introduce automation and robotics solutions to support agricultural activities.

Waypoint Generation in Row-based Crops with Deep Learning and Contrastive Clustering
In this paper, we propose a learning-based approach to tackle waypoint generation for planning a navigation path for row-based crops, starting from a top-view map of the region-of-interest.

A Deep Learning Driven Algorithmic Pipeline for Autonomous Navigation in Row-Based Crops
Expensive sensors and inefficient algorithmic pipelines significantly affect the overall cost of autonomous machines.
Action Transformer: A Self-Attention Model for Short-Time Pose-Based Human Action Recognition
Deep neural networks based purely on attention have been successful across several domains, relying on minimal architectural priors from the designer.


Efficient-CapsNet: Capsule Network with Self-Attention Routing
Deep convolutional neural networks, assisted by architectural design strategies, make extensive use of data augmentation techniques and layers with a high number of feature maps to embed object transformations.
 Ranked #2 on
Image Classification
on MNIST
Ranked #2 on
Image Classification
on MNIST

Robust Ultra-wideband Range Error Mitigation with Deep Learning at the Edge
Ultra-wideband (UWB) is the state-of-the-art and most popular technology for wireless localization.

Indoor Point-to-Point Navigation with Deep Reinforcement Learning and Ultra-wideband
Indoor autonomous navigation requires a precise and accurate localization system able to guide robots through cluttered, unstructured and dynamic environments.
DeepWay: A Deep Learning Estimator for Unmanned Ground Vehicle Global Path Planning
Agriculture 3. 0 and 4. 0 have gradually introduced service robotics and automation into several agricultural processes, mostly improving crops quality and seasonal yield.
DeepWay: a Deep Learning Waypoint Estimator for Global Path Generation
Agriculture 3. 0 and 4. 0 have gradually introduced service robotics and automation into several agricultural processes, mostly improving crops quality and seasonal yield.
A Cost-Effective Person-Following System for Assistive Unmanned Vehicles with Deep Learning at the Edge
The vital statistics of the last century highlight a sharp increment of the average age of the world population with a consequent growth of the number of older people.
Robotics
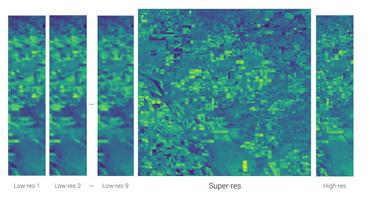
Multi-image Super Resolution of Remotely Sensed Images using Residual Feature Attention Deep Neural Networks
Convolutional Neural Networks (CNNs) have been consistently proved state-of-the-art results in image Super-Resolution (SR), representing an exceptional opportunity for the remote sensing field to extract further information and knowledge from captured data.
 Ranked #1 on
Image Super-Resolution
on EPFL NIR-VIS
Ranked #1 on
Image Super-Resolution
on EPFL NIR-VIS
Real-Time Apple Detection System Using Embedded Systems With Hardware Accelerators: An Edge AI Application
Real-time apple detection in orchards is one of the most effective ways of estimating apple yields, which helps in managing apple supplies more effectively.
