Search Results for author:
Found 22 papers, 10 papers with code
M3D: Advancing 3D Medical Image Analysis with Multi-Modal Large Language Models
Additionally, we propose M3D-LaMed, a versatile multi-modal large language model for 3D medical image analysis.

Joint Sparse Representations and Coupled Dictionary Learning in Multi-Source Heterogeneous Image Pseudo-color Fusion
Considering that Coupled Dictionary Learning (CDL) method can obtain a reasonable linear mathematical relationship between resource images, we propose a novel CDL-based Synthetic Aperture Radar (SAR) and multispectral pseudo-color fusion method.
Discrepancy-based Active Learning for Weakly Supervised Bleeding Segmentation in Wireless Capsule Endoscopy Images
Specifically, to liberate labor, we design a novel discrepancy decoder model and a CAMPUS (CAM, Pseudo-label and groUnd-truth Selection) criterion to replace the noisy CAMs with accurate model predictions and a few human labels.
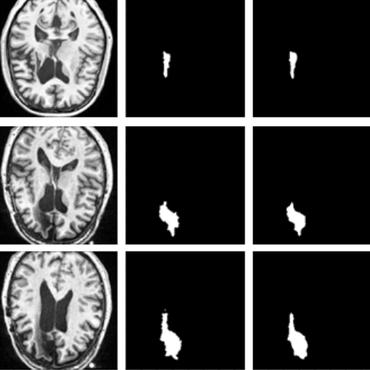
SLPT: Selective Labeling Meets Prompt Tuning on Label-Limited Lesion Segmentation
We evaluate our method on liver tumor segmentation and achieve state-of-the-art performance, outperforming traditional fine-tuning with only 6% of tunable parameters, also achieving 94% of full-data performance by labeling only 5% of the data.

Deep Koopman Operator with Control for Nonlinear Systems
Furthermore, most Koopman-based algorithms only consider nonlinear systems with linear control input, resulting in lousy prediction and control performance when the system is fully nonlinear with the control input.
Image-Guided Navigation of a Robotic Ultrasound Probe for Autonomous Spinal Sonography Using a Shadow-aware Dual-Agent Framework
Ultrasound (US) imaging is commonly used to assist in the diagnosis and interventions of spine diseases, while the standardized US acquisitions performed by manually operating the probe require substantial experience and training of sonographers.
Human-Aware Robot Navigation via Reinforcement Learning with Hindsight Experience Replay and Curriculum Learning
In recent years, the growing demand for more intelligent service robots is pushing the development of mobile robot navigation algorithms to allow safe and efficient operation in a dense crowd.
Automatic Recognition of Abdominal Organs in Ultrasound Images based on Deep Neural Networks and K-Nearest-Neighbor Classification
In order to shorten the examination time and reduce the cognitive burden on the sonographers, we present a classification method that combines the deep learning techniques and k-Nearest-Neighbor (k-NN) classification to automatically recognize various abdominal organs in the ultrasound images in real time.


Hierarchical Policy for Non-prehensile Multi-object Rearrangement with Deep Reinforcement Learning and Monte Carlo Tree Search
Non-prehensile multi-object rearrangement is a robotic task of planning feasible paths and transferring multiple objects to their predefined target poses without grasping.
Reinforcement Learning with Evolutionary Trajectory Generator: A General Approach for Quadrupedal Locomotion
However, due to the complex nonlinear dynamics in quadrupedal robots and reward sparsity, it is still difficult for RL to learn effective gaits from scratch, especially in challenging tasks such as walking over the balance beam.
Deep Learning-based Biological Anatomical Landmark Detection in Colonoscopy Videos
Second, a ResNet-101 based network is used to detect three biological anatomical landmarks separately to obtain the intermediate detection results.
Categorical Relation-Preserving Contrastive Knowledge Distillation for Medical Image Classification
With the contribution of the CCD and CRP, our CRCKD algorithm can distill the relational knowledge more comprehensively.

No Need for Interactions: Robust Model-Based Imitation Learning using Neural ODE
Interactions with either environments or expert policies during training are needed for most of the current imitation learning (IL) algorithms.
A Large-Scale Dataset for Benchmarking Elevator Button Segmentation and Character Recognition
Human activities are hugely restricted by COVID-19, recently.
Autonomous Navigation of an Ultrasound Probe Towards Standard Scan Planes with Deep Reinforcement Learning
Furthermore, we propose a confidence-based approach to encode the optimization of image quality in the learning process.

Generative Adversarial Network based Heuristics for Sampling-based Path Planning
Sampling-based path planning is a popular methodology for robot path planning.
Efficient Heuristic Generation for Robot Path Planning with Recurrent Generative Model
To address this issue, we present a novel recurrent generative model (RGM) which generates efficient heuristic to reduce the search efforts of path planning algorithm.
Conditional Generative Adversarial Networks for Optimal Path Planning
Path planning plays an important role in autonomous robot systems.
Autonomous Removal of Perspective Distortion for Robotic Elevator Button Recognition
To verify the effectiveness of the algorithm, we collect an elevator panel dataset of 50 images captured from different angles of view.
HouseExpo: A Large-scale 2D Indoor Layout Dataset for Learning-based Algorithms on Mobile Robots
As one of the most promising areas, mobile robots draw much attention these years.
Robotics
Learning to Interrupt: A Hierarchical Deep Reinforcement Learning Framework for Efficient Exploration
Our architecture has two key components: options, represented by existing human-designed methods, can significantly speed up the training process and interruption mechanism, based on learnable termination functions, enables our system to quickly respond to the external environment.
 Efficient Exploration
Hierarchical Reinforcement Learning
+3
Efficient Exploration
Hierarchical Reinforcement Learning
+3
Inverse Reinforcement Learning with Multi-Relational Chains for Robot-Centered Smart Home
In a robot-centered smart home, the robot observes the home states with its own sensors, and then it can change certain object states according to an operator's commands for remote operations, or imitate the operator's behaviors in the house for autonomous operations.
