Search Results for author:
Found 41 papers, 21 papers with code
Learning Galaxy Intrinsic Alignment Correlations
The intrinsic alignments (IA) of galaxies, regarded as a contaminant in weak lensing analyses, represents the correlation of galaxy shapes due to gravitational tidal interactions and galaxy formation processes.

TopoX: A Suite of Python Packages for Machine Learning on Topological Domains
We introduce TopoX, a Python software suite that provides reliable and user-friendly building blocks for computing and machine learning on topological domains that extend graphs: hypergraphs, simplicial, cellular, path and combinatorial complexes.
Fourier Transporter: Bi-Equivariant Robotic Manipulation in 3D
Many complex robotic manipulation tasks can be decomposed as a sequence of pick and place actions.
Topological Obstructions and How to Avoid Them
Incorporating geometric inductive biases into models can aid interpretability and generalization, but encoding to a specific geometric structure can be challenging due to the imposed topological constraints.
Fast and Expressive Gesture Recognition using a Combination-Homomorphic Electromyogram Encoder
New subjects only demonstrate the single component gestures and we seek to extrapolate from these to all possible single or combination gestures.
Discovering Symmetry Breaking in Physical Systems with Relaxed Group Convolution
Modeling symmetry breaking is essential for understanding the fundamental changes in the behaviors and properties of physical systems, from microscopic particle interactions to macroscopic phenomena like fluid dynamics and cosmic structures.

Latent Space Symmetry Discovery
It learns a mapping from the data space to a latent space where the symmetries become linear and simultaneously discovers symmetries in the latent space.
ICML 2023 Topological Deep Learning Challenge : Design and Results
This paper presents the computational challenge on topological deep learning that was hosted within the ICML 2023 Workshop on Topology and Geometry in Machine Learning.
Leveraging Symmetries in Pick and Place
This paper analytically studies the symmetries present in planar robotic pick and place and proposes a method of incorporating equivariant neural models into Transporter Net in a way that captures all symmetries.
Disentangling Node Attributes from Graph Topology for Improved Generalizability in Link Prediction
Our proposed method, UPNA (Unsupervised Pre-training of Node Attributes), solves the inductive link prediction problem by learning a function that takes a pair of node attributes and predicts the probability of an edge, as opposed to Graph Neural Networks (GNN), which can be prone to topological shortcuts in graphs with power-law degree distribution.
Can Euclidean Symmetry be Leveraged in Reinforcement Learning and Planning?
In robotic tasks, changes in reference frames typically do not influence the underlying physical properties of the system, which has been known as invariance of physical laws. These changes, which preserve distance, encompass isometric transformations such as translations, rotations, and reflections, collectively known as the Euclidean group.
Equivariant Single View Pose Prediction Via Induced and Restricted Representations
We show that an algorithm that learns a three-dimensional representation of the world from two dimensional images must satisfy certain geometric consistency properties which we formulate as SO(2)-equivariance constraints.

One-shot Imitation Learning via Interaction Warping
We propose a new method, Interaction Warping, for learning SE(3) robotic manipulation policies from a single demonstration.
On Robot Grasp Learning Using Equivariant Models
Real-world grasp detection is challenging due to the stochasticity in grasp dynamics and the noise in hardware.
Improving Convergence and Generalization Using Parameter Symmetries
Finally, we show that integrating teleportation into a wide range of optimization algorithms and optimization-based meta-learning improves convergence.

Image to Sphere: Learning Equivariant Features for Efficient Pose Prediction
Predicting the pose of objects from a single image is an important but difficult computer vision problem.
Generative Adversarial Symmetry Discovery
Despite the success of equivariant neural networks in scientific applications, they require knowing the symmetry group a priori.
The Surprising Effectiveness of Equivariant Models in Domains with Latent Symmetry
Extensive work has demonstrated that equivariant neural networks can significantly improve sample efficiency and generalization by enforcing an inductive bias in the network architecture.
Edge Grasp Network: A Graph-Based SE(3)-invariant Approach to Grasp Detection
Given point cloud input, the problem of 6-DoF grasp pose detection is to identify a set of hand poses in SE(3) from which an object can be successfully grasped.
Symmetries, flat minima, and the conserved quantities of gradient flow
Empirical studies of the loss landscape of deep networks have revealed that many local minima are connected through low-loss valleys.
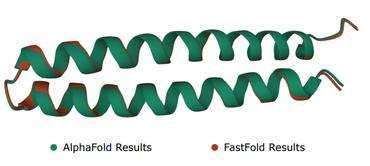
Secondary Protein Structure Prediction Using Neural Networks
Secondly, we test the impact of varying the length of protein sequence we input into the model.
Quiver neural networks
We develop a uniform theoretical approach towards the analysis of various neural network connectivity architectures by introducing the notion of a quiver neural network.
Image to Icosahedral Projection for $\mathrm{SO}(3)$ Object Reasoning from Single-View Images
In this paper, we propose a novel architecture based on icosahedral group convolutions that reasons in $\mathrm{SO(3)}$ by learning a projection of the input image onto an icosahedron.
Data Augmentation vs. Equivariant Networks: A Theory of Generalization on Dynamics Forecasting
In this work, we derive the generalization bounds for data augmentation and equivariant networks, characterizing their effect on learning in a unified framework.

Integrating Symmetry into Differentiable Planning with Steerable Convolutions
Our implementation is based on VINs and uses steerable convolution networks to incorporate symmetry.
Topological Deep Learning: Going Beyond Graph Data
Topological deep learning is a rapidly growing field that pertains to the development of deep learning models for data supported on topological domains such as simplicial complexes, cell complexes, and hypergraphs, which generalize many domains encountered in scientific computations.
Symmetry Teleportation for Accelerated Optimization
Experimentally, we show that teleportation improves the convergence speed of gradient descent and AdaGrad for several optimization problems including test functions, multi-layer regressions, and MNIST classification.
Probabilistic Symmetry for Multi-Agent Dynamics
We propose a novel deep dynamics model, Probabilistic Equivariant Continuous COnvolution (PECCO) for probabilistic prediction of multi-agent trajectories.

Toward Compositional Generalization in Object-Oriented World Modeling
Compositional generalization is a critical ability in learning and decision-making.
Learning Symmetric Embeddings for Equivariant World Models
Incorporating symmetries can lead to highly data-efficient and generalizable models by defining equivalence classes of data samples related by transformations.
Approximately Equivariant Networks for Imperfectly Symmetric Dynamics
Incorporating symmetry as an inductive bias into neural network architecture has led to improvements in generalization, data efficiency, and physical consistency in dynamics modeling.
AI-Bind: Improving Binding Predictions for Novel Protein Targets and Ligands
Identifying novel drug-target interactions (DTI) is a critical and rate limiting step in drug discovery.

Model Compression via Symmetries of the Parameter Space
We provide a theoretical framework for neural networks in terms of the representation theory of quivers, thus revealing symmetries of the parameter space of neural networks.
Learning Symmetric Representations for Equivariant World Models
In this paper, we use equivariant transition models as an inductive bias to learn symmetric latent representations in a self-supervised manner.
Automatic Symmetry Discovery with Lie Algebra Convolutional Network
Existing equivariant neural networks require prior knowledge of the symmetry group and discretization for continuous groups.
Universal approximation and model compression for radial neural networks
We introduce a class of fully-connected neural networks whose activation functions, rather than being pointwise, rescale feature vectors by a function depending only on their norm.
Traffic Forecasting using Vehicle-to-Vehicle Communication
In order to best utilize real-world V2V communication data, we integrate first principle models with deep learning.
Meta-Learning Dynamics Forecasting Using Task Inference
DyAd has two parts: an encoder which infers the time-invariant hidden features of the task with weak supervision, and a forecaster which learns the shared dynamics of the entire domain.
Lie Algebra Convolutional Neural Networks with Automatic Symmetry Extraction
We propose to learn the symmetries during the training of the group equivariant architectures.
Trajectory Prediction using Equivariant Continuous Convolution
Trajectory prediction is a critical part of many AI applications, for example, the safe operation of autonomous vehicles.

Incorporating Symmetry into Deep Dynamics Models for Improved Generalization
Recent work has shown deep learning can accelerate the prediction of physical dynamics relative to numerical solvers.
