Object Detection
3733 papers with code • 91 benchmarks • 262 datasets
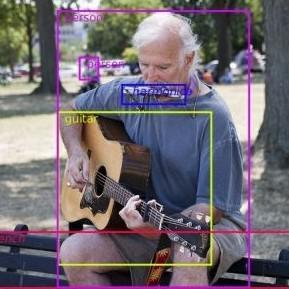
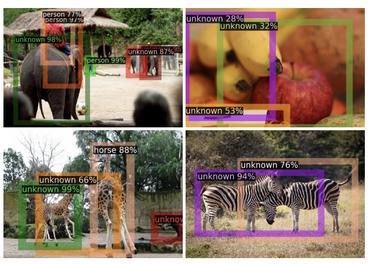
Object Detection is a computer vision task in which the goal is to detect and locate objects of interest in an image or video. The task involves identifying the position and boundaries of objects in an image, and classifying the objects into different categories. It forms a crucial part of vision recognition, alongside image classification and retrieval.
The state-of-the-art methods can be categorized into two main types: one-stage methods and two stage-methods:
-
One-stage methods prioritize inference speed, and example models include YOLO, SSD and RetinaNet.
-
Two-stage methods prioritize detection accuracy, and example models include Faster R-CNN, Mask R-CNN and Cascade R-CNN.
The most popular benchmark is the MSCOCO dataset. Models are typically evaluated according to a Mean Average Precision metric.
( Image credit: Detectron )

Benchmarks
These leaderboards are used to track progress in Object Detection
| Trend | Dataset | Best Model | Paper | Code | Compare |
|---|---|---|---|---|---|

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
Libraries
Use these libraries to find Object Detection models and implementationsDatasets
 MS COCO
MS COCO
 KITTI
KITTI
 nuScenes
nuScenes
 Visual Genome
Visual Genome
 LVIS
LVIS
 SUN RGB-D
SUN RGB-D
 Waymo Open Dataset
Waymo Open Dataset
 BDD100K
BDD100K
 MVTecAD
MVTecAD
 Manga109
Manga109
Subtasks
-
 3D Object Detection
3D Object Detection
-
 Real-Time Object Detection
Real-Time Object Detection
-
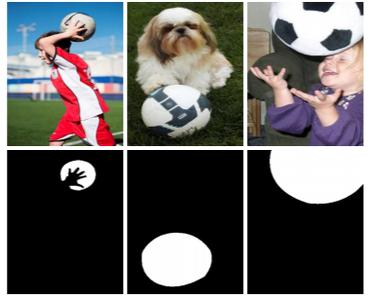
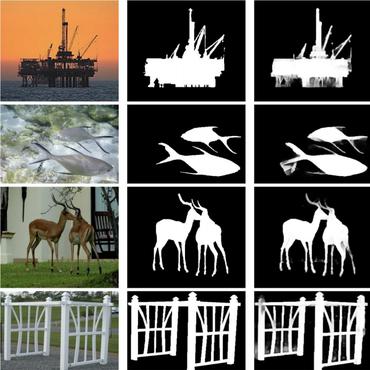 RGB Salient Object Detection
RGB Salient Object Detection
-
 Few-Shot Object Detection
Few-Shot Object Detection
-
Few-Shot Object Detection
-
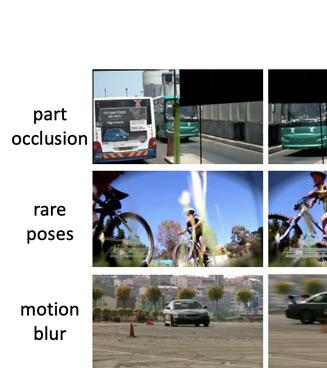
 Video Object Detection
Video Object Detection
-
 RGB-D Salient Object Detection
RGB-D Salient Object Detection
-
 Open Vocabulary Object Detection
Open Vocabulary Object Detection
-
 Object Detection In Aerial Images
Object Detection In Aerial Images
-
 Weakly Supervised Object Detection
Weakly Supervised Object Detection
-
 Small Object Detection
Small Object Detection
-
 Robust Object Detection
Robust Object Detection
-
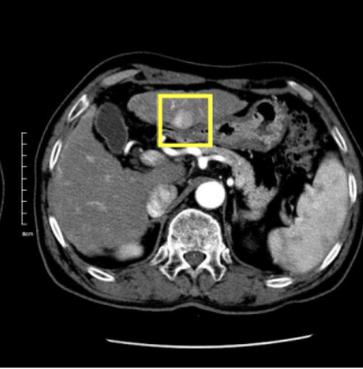 Medical Object Detection
Medical Object Detection
-
 Zero-Shot Object Detection
Zero-Shot Object Detection
-
 Open World Object Detection
Open World Object Detection
-
 Co-Salient Object Detection
Co-Salient Object Detection
-
 Dense Object Detection
Dense Object Detection
-
 Object Proposal Generation
Object Proposal Generation
-
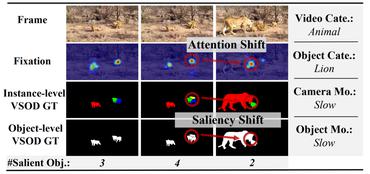 Video Salient Object Detection
Video Salient Object Detection
-
 Camouflaged Object Segmentation
Camouflaged Object Segmentation
-
 License Plate Detection
License Plate Detection
-
Head Detection
-
 Multiview Detection
Multiview Detection
-
 3D Object Detection From Monocular Images
3D Object Detection From Monocular Images
-
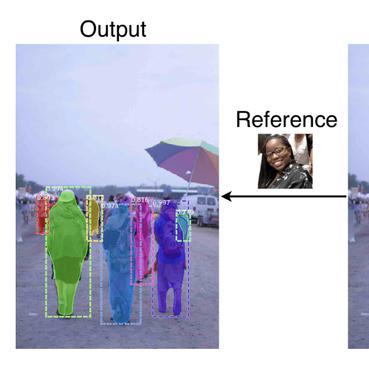 One-Shot Object Detection
One-Shot Object Detection
-
Moving Object Detection
-
Surgical tool detection
-
Described Object Detection
-
Body Detection
-
Pupil Detection
-
 Object Detection In Indoor Scenes
Object Detection In Indoor Scenes
-
 Class-agnostic Object Detection
Class-agnostic Object Detection
-
Semantic Part Detection
-
 Object Skeleton Detection
Object Skeleton Detection
-
Fish Detection
-
 Multiple Affordance Detection
Multiple Affordance Detection
-
Weakly Supervised 3D Detection
Latest papers with no code
Reviewing Intelligent Cinematography: AI research for camera-based video production
The main discussion categorizes work by four production types: General Production, Virtual Production, Live Production and Aerial Production.
A New Dataset and Comparative Study for Aphid Cluster Detection and Segmentation in Sorghum Fields
In this study, we trained and evaluated four real-time semantic segmentation models and three object detection models specifically for aphid cluster segmentation and detection.
DriveWorld: 4D Pre-trained Scene Understanding via World Models for Autonomous Driving
In this paper, we address this challenge by introducing a world model-based autonomous driving 4D representation learning framework, dubbed \emph{DriveWorld}, which is capable of pre-training from multi-camera driving videos in a spatio-temporal fashion.
ViewFormer: Exploring Spatiotemporal Modeling for Multi-View 3D Occupancy Perception via View-Guided Transformers
Leveraging the proposed view attention as well as an additional multi-frame streaming temporal attention, we introduce ViewFormer, a vision-centric transformer-based framework for spatiotemporal feature aggregation.
Deep Event-based Object Detection in Autonomous Driving: A Survey
Object detection plays a critical role in autonomous driving, where accurately and efficiently detecting objects in fast-moving scenes is crucial.
A Novel Wide-Area Multiobject Detection System with High-Probability Region Searching
To address these challenges, this paper presents a hybrid system that incorporates a wide-angle camera, a high-speed search camera, and a galvano-mirror.
Low-light Object Detection
In this competition we employed a model fusion approach to achieve object detection results close to those of real images.
Salient Object Detection From Arbitrary Modalities
The most prominent characteristics of AM SOD are that the modality types and modality numbers will be arbitrary or dynamically changed.
Modality Prompts for Arbitrary Modality Salient Object Detection
A novel modality-adaptive Transformer (MAT) will be proposed to investigate two fundamental challenges of AM SOD, ie more diverse modality discrepancies caused by varying modality types that need to be processed, and dynamic fusion design caused by an uncertain number of modalities present in the inputs of multimodal fusion strategy.
BadFusion: 2D-Oriented Backdoor Attacks against 3D Object Detection
To tackle this issue, we propose an innovative 2D-oriented backdoor attack against LiDAR-camera fusion methods for 3D object detection, named BadFusion, for preserving trigger effectiveness throughout the entire fusion process.
