Search Results for author:
Found 367 papers, 117 papers with code
Markerless Inside-Out Tracking for Interventional Applications
Tracking of rotation and translation of medical instruments plays a substantial role in many modern interventions.

Initialize globally before acting locally: Enabling Landmark-free 3D US to MRI Registration
Registration of partial-view 3D US volumes with MRI data is influenced by initialization.

Inherent Brain Segmentation Quality Control from Fully ConvNet Monte Carlo Sampling
We introduce inherent measures for effective quality control of brain segmentation based on a Bayesian fully convolutional neural network, using model uncertainty.
Machine learning-based colon deformation estimation method for colonoscope tracking
An estimation method of colon deformations occur during colonoscope insertions is necessary to reduce tracking errors.
Scene Coordinate and Correspondence Learning for Image-Based Localization
Scene coordinate regression has become an essential part of current camera re-localization methods.
Generalizing multistain immunohistochemistry tissue segmentation using one-shot color deconvolution deep neural networks
A key challenge in cancer immunotherapy biomarker research is quantification of pattern changes in microscopic whole slide images of tumor biopsies.
Situation Assessment for Planning Lane Changes: Combining Recurrent Models and Prediction
One of the greatest challenges towards fully autonomous cars is the understanding of complex and dynamic scenes.
When Regression Meets Manifold Learning for Object Recognition and Pose Estimation
By combining the strengths of manifold learning using triplet loss and pose regression, we could either estimate the pose directly reducing the complexity compared to NN search, or use learned descriptor for the NN descriptor matching.


Multi Layered-Parallel Graph Convolutional Network (ML-PGCN) for Disease Prediction
Structural data from Electronic Health Records as complementary information to imaging data for disease prediction.
Analyzing and Exploiting NARX Recurrent Neural Networks for Long-Term Dependencies
Recurrent neural networks (RNNs) have achieved state-of-the-art performance on many diverse tasks, from machine translation to surgical activity recognition, yet training RNNs to capture long-term dependencies remains difficult.

Domain and Geometry Agnostic CNNs for Left Atrium Segmentation in 3D Ultrasound
Segmentation of the left atrium and deriving its size can help to predict and detect various cardiovascular conditions.

MelanoGANs: High Resolution Skin Lesion Synthesis with GANs
Generative Adversarial Networks (GANs) have been successfully used to synthesize realistically looking images of faces, scenery and even medical images.

Exploiting Partial Structural Symmetry For Patient-Specific Image Augmentation in Trauma Interventions
The main challenge is to automatically estimate the desired plane of symmetry within the patient's pre-operative CT. We propose to estimate this plane using a non-linear optimization strategy, by minimizing Tukey's biweight robust estimator, relying on the partial symmetry of the anatomy.

Webly Supervised Learning for Skin Lesion Classification
Within medical imaging, manual curation of sufficient well-labeled samples is cost, time and scale-prohibitive.


Multi-modal Disease Classification in Incomplete Datasets Using Geometric Matrix Completion
In this work, we follow up on the idea of modeling multi-modal disease classification as a matrix completion problem, with simultaneous classification and non-linear imputation of features.
Guide Me: Interacting with Deep Networks
Interaction and collaboration between humans and intelligent machines has become increasingly important as machine learning methods move into real-world applications that involve end users.

Generalizability vs. Robustness: Adversarial Examples for Medical Imaging
In this paper, for the first time, we propose an evaluation method for deep learning models that assesses the performance of a model not only in an unseen test scenario, but also in extreme cases of noise, outliers and ambiguous input data.
Closing the Calibration Loop: An Inside-out-tracking Paradigm for Augmented Reality in Orthopedic Surgery
In percutaneous orthopedic interventions the surgeon attempts to reduce and fixate fractures in bony structures.

A Minimalist Approach to Type-Agnostic Detection of Quadrics in Point Clouds
As opposed to state-of-the-art, where a tailored algorithm treats each primitive type separately, we propose to encapsulate all types in a single robust detection procedure.
Fast 5DOF Needle Tracking in iOCT
We propose to build on its desirable qualities and present a method for tracking the orientation and location of a surgical needle.
On-the-fly Augmented Reality for Orthopaedic Surgery Using a Multi-Modal Fiducial
Then, annotations on the 2D X-ray images can be rendered as virtual objects in 3D providing surgical guidance.
Plan in 2D, execute in 3D: An augmented reality solution for cup placement in total hip arthroplasty
Reproducibly achieving proper implant alignment is a critical step in total hip arthroplasty (THA) procedures that has been shown to substantially affect patient outcome.
Multi-layer Visualization for Medical Mixed Reality
In this paper and to our knowledge, we propose a multi-layer visualization in Medical Mixed Reality solution which subtly improves a surgeon's visualization by making transparent the occluding objects.
6D Object Pose Estimation with Depth Images: A Seamless Approach for Robotic Interaction and Augmented Reality
To determine the 3D orientation and 3D location of objects in the surroundings of a camera mounted on a robot or mobile device, we developed two powerful algorithms in object detection and temporal tracking that are combined seamlessly for robotic perception and interaction as well as Augmented Reality (AR).

The TUM LapChole dataset for the M2CAI 2016 workflow challenge
In this technical report we present our collected dataset of laparoscopic cholecystectomies (LapChole).
Camera Pose Filtering with Local Regression Geodesics on the Riemannian Manifold of Dual Quaternions
Time-varying, smooth trajectory estimation is of great interest to the vision community for accurate and well behaving 3D systems.

Learning in an Uncertain World: Representing Ambiguity Through Multiple Hypotheses
In future prediction, for example, many distinct outcomes are equally valid.

Long Short-Term Memory Kalman Filters:Recurrent Neural Estimators for Pose Regularization
One-shot pose estimation for tasks such as body joint localization, camera pose estimation, and object tracking are generally noisy, and temporal filters have been extensively used for regularization.


Concurrent Segmentation and Localization for Tracking of Surgical Instruments
Real-time instrument tracking is a crucial requirement for various computer-assisted interventions.
Error Corrective Boosting for Learning Fully Convolutional Networks with Limited Data
While large datasets of unlabeled image data are available in medical applications, access to manually labeled data is very limited.
Segmentation of Intracranial Arterial Calcification with Deeply Supervised Residual Dropout Networks
In this paper, we propose a method for automatic segmentation of ICAC; the first to our knowledge.
Learning-based Surgical Workflow Detection from Intra-Operative Signals
A modern operating room (OR) provides a plethora of advanced medical devices.
X-ray In-Depth Decomposition: Revealing The Latent Structures
X-ray radiography is the most readily available imaging modality and has a broad range of applications that spans from diagnosis to intra-operative guidance in cardiac, orthopedics, and trauma procedures.
Learning Robust Hash Codes for Multiple Instance Image Retrieval
In this paper, for the first time, we introduce a multiple instance (MI) deep hashing technique for learning discriminative hash codes with weak bag-level supervision suited for large-scale retrieval.

Cross-Modal Manifold Learning for Cross-modal Retrieval
This paper presents a new scalable algorithm for cross-modal similarity preserving retrieval in a learnt manifold space.
Deep Residual Hashing
Hashing aims at generating highly compact similarity preserving code words which are well suited for large-scale image retrieval tasks.
Hands-Free Segmentation of Medical Volumes via Binary Inputs
We propose a novel hands-free method to interactively segment 3D medical volumes.
A Deep Metric for Multimodal Registration
Multimodal registration is a challenging problem in medical imaging due the high variability of tissue appearance under different imaging modalities.
Mitosis Detection in Intestinal Crypt Images with Hough Forest and Conditional Random Fields
A statistical analysis of these measurements requires annotation of mitosis events, which is currently a tedious and time-consuming task that has to be performed manually.
An Octree-Based Approach towards Efficient Variational Range Data Fusion
Volume-based reconstruction is usually expensive both in terms of memory consumption and runtime.
Hashmod: A Hashing Method for Scalable 3D Object Detection
We present a scalable method for detecting objects and estimating their 3D poses in RGB-D data.

Deep Learning of Local RGB-D Patches for 3D Object Detection and 6D Pose Estimation
We present a 3D object detection method that uses regressed descriptors of locally-sampled RGB-D patches for 6D vote casting.

Deep Active Contours
We propose a method for interactive boundary extraction which combines a deep, patch-based representation with an active contour framework.
A Taxonomy and Library for Visualizing Learned Features in Convolutional Neural Networks
Over the last decade, Convolutional Neural Networks (CNN) saw a tremendous surge in performance.
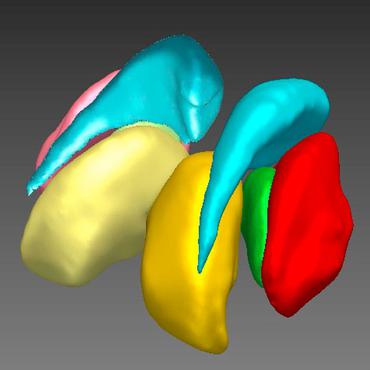
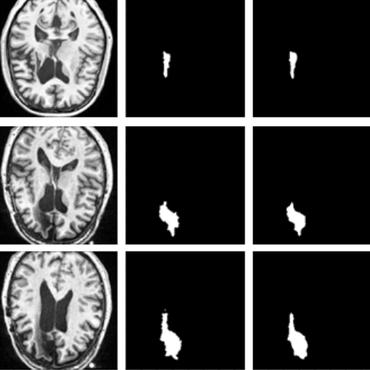
Hough-CNN: Deep Learning for Segmentation of Deep Brain Regions in MRI and Ultrasound
In this work we propose a novel approach to perform segmentation by leveraging the abstraction capabilities of convolutional neural networks (CNNs).
Semi-Automatic Segmentation of Autosomal Dominant Polycystic Kidneys using Random Forests
This paper presents a method for 3D segmentation of kidneys from patients with autosomal dominant polycystic kidney disease (ADPKD) and severe renal insufficiency, using computed tomography (CT) data.

Augmented Reality-based Feedback for Technician-in-the-loop C-arm Repositioning
For C-arm repositioning to a particular target view, the recorded C-arm pose is restored as a virtual object and visualized in an AR environment, serving as a perceptual reference for the technician.
SynNet: Structure-Preserving Fully Convolutional Networks for Medical Image Synthesis
Cross modal image syntheses is gaining significant interests for its ability to estimate target images of a different modality from a given set of source images, like estimating MR to MR, MR to CT, CT to PET etc, without the need for an actual acquisition. Though they show potential for applications in radiation therapy planning, image super resolution, atlas construction, image segmentation etc. The synthesis results are not as accurate as the actual acquisition. In this paper, we address the problem of multi modal image synthesis by proposing a fully convolutional deep learning architecture called the SynNet. We extend the proposed architecture for various input output configurations.
Competition vs. Concatenation in Skip Connections of Fully Convolutional Networks
Increased information sharing through short and long-range skip connections between layers in fully convolutional networks have demonstrated significant improvement in performance for semantic segmentation.

Peeking Behind Objects: Layered Depth Prediction from a Single Image
While conventional depth estimation can infer the geometry of a scene from a single RGB image, it fails to estimate scene regions that are occluded by foreground objects.

Towards Robotic Eye Surgery: Marker-free, Online Hand-eye Calibration using Optical Coherence Tomography Images
Ophthalmic microsurgery is known to be a challenging operation, which requires very precise and dexterous manipulation.
Deep Learned Full-3D Object Completion from Single View
3D geometry is a very informative cue when interacting with and navigating an environment.

Generating Highly Realistic Images of Skin Lesions with GANs
As many other machine learning driven medical image analysis tasks, skin image analysis suffers from a chronic lack of labeled data and skewed class distributions, which poses problems for the training of robust and well-generalizing models.
GANs for Medical Image Analysis
Generative Adversarial Networks (GANs) and their extensions have carved open many exciting ways to tackle well known and challenging medical image analysis problems such as medical image de-noising, reconstruction, segmentation, data simulation, detection or classification.
Weakly-Supervised Localization and Classification of Proximal Femur Fractures
In this paper, we target the problem of fracture classification from clinical X-Ray images towards an automated Computer Aided Diagnosis (CAD) system.
Virtualization of tissue staining in digital pathology using an unsupervised deep learning approach
Histopathological evaluation of tissue samples is a key practice in patient diagnosis and drug development, especially in oncology.
InfiNet: Fully Convolutional Networks for Infant Brain MRI Segmentation
We present a novel, parameter-efficient and practical fully convolutional neural network architecture, termed InfiNet, aimed at voxel-wise semantic segmentation of infant brain MRI images at iso-intense stage, which can be easily extended for other segmentation tasks involving multi-modalities.
Adversarial Semantic Scene Completion from a Single Depth Image
We propose a method to reconstruct, complete and semantically label a 3D scene from a single input depth image.
The speaker-independent lipreading play-off; a survey of lipreading machines
Lipreading is a difficult gesture classification task.
Dealing with Ambiguity in Robotic Grasping via Multiple Predictions
Further, we reformulate the problem of robotic grasping by replacing conventional grasp rectangles with grasp belief maps, which hold more precise location information than a rectangle and account for the uncertainty inherent to the task.
Redefining Ultrasound Compounding: Computational Sonography
By providing a novel paradigm for the acquisition and reconstruction of tracked freehand 3D ultrasound, this work presents the concept of Computational Sonography (CS) to model the directionality of ultrasound information.
Explaining the Ambiguity of Object Detection and 6D Pose From Visual Data
For each object instance we predict multiple pose and class outcomes to estimate the specific pose distribution generated by symmetries and repetitive textures.
Adversarial Signal Denoising with Encoder-Decoder Networks
The presence of noise is common in signal processing regardless the signal type.

Distortion-Aware Convolutional Filters for Dense Prediction in Panoramic Images
There is a high demand of 3D data for 360° panoramic images and videos, pushed by the growing availability on the market of specialized hardware for both capturing (e. g., omnidirectional cameras) as well as visualizing in 3D (e. g., head mounted displays) panoramic images and videos.
 Ranked #10 on
Depth Estimation
on Stanford2D3D Panoramic
Ranked #10 on
Depth Estimation
on Stanford2D3D Panoramic
Self-Attention Equipped Graph Convolutions for Disease Prediction
A model capable of leveraging the individuality of each multi-modal data is required for better disease prediction.
Generic Primitive Detection in Point Clouds Using Novel Minimal Quadric Fits
Based upon the idea of aligning the quadric gradients with the surface normals, our first formulation is exact and requires as low as four oriented points.
Data Augmentation with Manifold Exploring Geometric Transformations for Increased Performance and Robustness
Compared with traditional augmentation methods, and with images synthesized by Generative Adversarial Networks our method not only achieves state-of-the-art performance but also significantly improves the network's robustness.

3D Pictorial Structures for Multiple Human Pose Estimation
In this work, we address the problem of 3D pose estimation of multiple humans from multiple views.
 Ranked #24 on
3D Multi-Person Pose Estimation
on Shelf
Ranked #24 on
3D Multi-Person Pose Estimation
on Shelf


Human Shape and Pose Tracking Using Keyframes
In contrast to many existing approaches that rely on a single reference model, multiple templates represent a larger variability of human poses.
Total Variation Regularization of Shape Signals
This paper introduces the concept of shape signals, i. e., series of shapes which have a natural temporal or spatial ordering, as well as a variational formulation for the regularization of these signals.
Image Segmentation in Twenty Questions
Consider the following scenario between a human user and the computer.
Toward User-Specific Tracking by Detection of Human Shapes in Multi-Cameras
It usually comprises an association step, that finds correspondences between the model and the input data, and a deformation step, that fits the model to the observations given correspondences.

Volumetric 3D Tracking by Detection
In this paper, we propose a new framework for 3D tracking by detection based on fully volumetric representations.
Weakly-Supervised Structured Output Learning With Flexible and Latent Graphs Using High-Order Loss Functions
We introduce two new structured output models that use a latent graph, which is flexible in terms of the number of nodes and structure, where the training process minimises a high-order loss function using a weakly annotated training set.
A Versatile Learning-Based 3D Temporal Tracker: Scalable, Robust, Online
This paper proposes a temporal tracking algorithm based on Random Forest that uses depth images to estimate and track the 3D pose of a rigid object in real-time.
Long Short-Term Memory Kalman Filters: Recurrent Neural Estimators for Pose Regularization
One-shot pose estimation for tasks such as body joint localization, camera pose estimation, and object tracking are generally noisy, and temporal filters have been extensively used for regularization.
Precise Proximal Femur Fracture Classification for Interactive Training and Surgical Planning
We demonstrate the feasibility of a fully automatic computer-aided diagnosis (CAD) tool, based on deep learning, that localizes and classifies proximal femur fractures on X-ray images according to the AO classification.
Attention-based Lane Change Prediction
Lane change prediction of surrounding vehicles is a key building block of path planning.
InceptionGCN: Receptive Field Aware Graph Convolutional Network for Disease Prediction
Geometric deep learning provides a principled and versatile manner for the integration of imaging and non-imaging modalities in the medical domain.
Adversarial Networks for Camera Pose Regression and Refinement
Despite recent advances on the topic of direct camera pose regression using neural networks, accurately estimating the camera pose of a single RGB image still remains a challenging task.
Deep Learning Under the Microscope: Improving the Interpretability of Medical Imaging Neural Networks
In this paper, we propose a novel interpretation method tailored to histological Whole Slide Image (WSI) processing.
3DQ: Compact Quantized Neural Networks for Volumetric Whole Brain Segmentation
Model architectures have been dramatically increasing in size, improving performance at the cost of resource requirements.
End-to-End Learning-Based Ultrasound Reconstruction
The proposed method displays both promising image reconstruction quality and acquisition frequency when integrated for live ultrasound scanning.
Weakly-Supervised White and Grey Matter Segmentation in 3D Brain Ultrasound
We implement label transfer from MRI to US, which is prone to a residual but inevitable registration error.

Collaboration Analysis Using Deep Learning
The analysis of the collaborative learning process is one of the growing fields of education research, which has many different analytic solutions.
Fully Automatic Segmentation of 3D Brain Ultrasound: Learning from Coarse Annotations
Trained on the dataset alone, we report a Dice and Jaccard coefficient of $0. 45 \pm 0. 09$ and $0. 30 \pm 0. 07$ respectively, as well as an average distance of $0. 78 \pm 0. 36~mm$.
Learning Interpretable Disentangled Representations using Adversarial VAEs
Learning Interpretable representation in medical applications is becoming essential for adopting data-driven models into clinical practice.

Multi-scale Microaneurysms Segmentation Using Embedding Triplet Loss
To enhance the discriminative power of the classification model, we incorporate triplet embedding loss with a selective sampling routine.
Multi-modal Graph Fusion for Inductive Disease Classification in Incomplete Datasets
Recently, several works proposed geometric deep learning approaches to solve disease classification, by modeling patients as nodes in a graph, along with graph signal processing of multi-modal features.
Adaptive Image-Feature Learning for Disease Classification Using Inductive Graph Networks
We propose a new network architecture that exploits an inductive end-to-end learning approach for disease classification, where filters from both the CNN and the graph are trained jointly.
Learning Interpretable Features via Adversarially Robust Optimization
In this work, we propose a method for improving the feature interpretability of neural network classifiers.
BrainTorrent: A Peer-to-Peer Environment for Decentralized Federated Learning
A disadvantage of FL is the dependence on a central server, which requires all clients to agree on one trusted central body, and whose failure would disrupt the training process of all clients.
Perceptual Embedding Consistency for Seamless Reconstruction of Tilewise Style Transfer
Recent work has shown Generative Adversarial Networks(GANs) can be used to create realistic images of virtually stained slide images in digital pathology with clinically validated interpretability.

Domain-Specific Priors and Meta Learning for Few-Shot First-Person Action Recognition
The lack of large-scale real datasets with annotations makes transfer learning a necessity for video activity understanding.


Reflective-AR Display: An Interaction Methodology for Virtual-Real Alignment in Medical Robotics
To overcome this challenge, we introduce a novel registration concept for intuitive alignment of AR content to its physical counterpart by providing a multi-view AR experience via reflective-AR displays that simultaneously show the augmentations from multiple viewpoints.
Few-Shot Meta-Denoising
A solution to mitigate the small training set issue is to pre-train a denoising model with small training sets containing pairs of clean and synthesized noisy signals, produced from empirical noise priors, and fine-tune on the available small training set.
Grasp Type Estimation for Myoelectric Prostheses using Point Cloud Feature Learning
Prosthetic hands can help people with limb difference to return to their life routines.
Towards Unsupervised Image Captioning with Shared Multimodal Embeddings
The core component of our approach is a shared latent space that is structured by visual concepts.

Object-Driven Multi-Layer Scene Decomposition From a Single Image
Our approach aims at building up a Layered Depth Image (LDI) from a single RGB input, which is an efficient representation that arranges the scene in layers, including originally occluded regions.
ForkNet: Multi-branch Volumetric Semantic Completion from a Single Depth Image
We propose a novel model for 3D semantic completion from a single depth image, based on a single encoder and three separate generators used to reconstruct different geometric and semantic representations of the original and completed scene, all sharing the same latent space.
 Ranked #7 on
3D Semantic Scene Completion
on NYUv2
(using extra training data)
Ranked #7 on
3D Semantic Scene Completion
on NYUv2
(using extra training data)

Learn to Segment Organs with a Few Bounding Boxes
Semantic segmentation is an import task in the medical field to identify the exact extent and orientation of significant structures like organs and pathology.
Learn to Estimate Labels Uncertainty for Quality Assurance
Deep Learning sets the state-of-the-art in many challenging tasks showing outstanding performance in a broad range of applications.

Learning to Avoid Poor Images: Towards Task-aware C-arm Cone-beam CT Trajectories
Metal artifacts in computed tomography (CT) arise from a mismatch between physics of image formation and idealized assumptions during tomographic reconstruction.
CAI4CAI: The Rise of Contextual Artificial Intelligence in Computer Assisted Interventions
Data-driven computational approaches have evolved to enable extraction of information from medical images with a reliability, accuracy and speed which is already transforming their interpretation and exploitation in clinical practice.
Radar Emitter Classification with Attribute-specific Recurrent Neural Networks
Radar pulse streams exhibit increasingly complex temporal patterns and can no longer rely on a purely value-based analysis of the pulse attributes for the purpose of emitter classification.
Signal Clustering with Class-independent Segmentation
Radar signals have been dramatically increasing in complexity, limiting the source separation ability of traditional approaches.
Improving Feature Attribution through Input-specific Network Pruning
Attributing the output of a neural network to the contribution of given input elements is a way of shedding light on the black-box nature of neural networks.
Real-Time 3D Model Tracking in Color and Depth on a Single CPU Core
We present a novel method to track 3D models in color and depth data.
A Comparative Analysis of Virtual Reality Head-Mounted Display Systems
With recent advances of Virtual Reality (VR) technology, the deployment of such will dramatically increase in non-entertainment environments, such as professional education and training, manufacturing, service, or low frequency/high risk scenarios.
Understanding the effects of artifacts on automated polyp detection and incorporating that knowledge via learning without forgetting
We then investigated different strategies, such as a learning without forgetting framework, to leverage artifact knowledge to improve automated polyp detection.
Spatiotemporal-Aware Augmented Reality: Redefining HCI in Image-Guided Therapy
Suboptimal interaction with patient data and challenges in mastering 3D anatomy based on ill-posed 2D interventional images are essential concerns in image-guided therapies.
Exploring Partial Intrinsic and Extrinsic Symmetry in 3D Medical Imaging
We present a novel methodology to detect imperfect bilateral symmetry in CT of human anatomy.
From Perspective X-ray Imaging to Parallax-Robust Orthographic Stitching
Stitching images acquired under perspective projective geometry is a relevant topic in computer vision with multiple applications ranging from smartphone panoramas to the construction of digital maps.

On the Effectiveness of Virtual Reality-based Training for Robotic Setup
We trained 30 participants on how to set up a robotic arm in an environment mimicking clinical setup.
Robotics
CPS++: Improving Class-level 6D Pose and Shape Estimation From Monocular Images With Self-Supervised Learning
Contemporary monocular 6D pose estimation methods can only cope with a handful of object instances.
Latent-Graph Learning for Disease Prediction
Recently, Graph Convolutional Networks (GCNs) have proven to be a powerful machine learning tool for Computer-Aided Diagnosis (CADx) and disease prediction.
Peri-Diagnostic Decision Support Through Cost-Efficient Feature Acquisition at Test-Time
Computer-aided diagnosis (CADx) algorithms in medicine provide patient-specific decision support for physicians.
Medical-based Deep Curriculum Learning for Improved Fracture Classification
Current deep-learning based methods do not easily integrate to clinical protocols, neither take full advantage of medical knowledge.
Confident Coreset for Active Learning in Medical Image Analysis
Active learning is one of the solutions to this problem where an active learner is designed to indicate which samples need to be annotated to effectively train a target model.
Learning 3D Semantic Scene Graphs from 3D Indoor Reconstructions
In our work we focus on scene graphs, a data structure that organizes the entities of a scene in a graph, where objects are nodes and their relationships modeled as edges.
 Ranked #3 on
3d scene graph generation
on 3DSSG
Ranked #3 on
3d scene graph generation
on 3DSSG

Colonoscope tracking method based on shape estimation network
We utilize the shape estimation network (SEN), which estimates deformed colon shape during colonoscope insertions.
Explicit Domain Adaptation with Loosely Coupled Samples
In this work we propose a transfer learning framework, core of which is learning an explicit mapping between domains.

Colon Shape Estimation Method for Colonoscope Tracking using Recurrent Neural Networks
We propose a colon deformation estimation method using RNN and obtain the colonoscope shape from electromagnetic sensors during its insertion into the colon.
Decision Support for Intoxication Prediction Using Graph Convolutional Networks
Due to the time-sensitive nature of these cases, doctors are required to propose a correct diagnosis and intervention within a minimal time frame.
Domain-specific loss design for unsupervised physical training: A new approach to modeling medical ML solutions
The cataract, a developing opacity of the human eye lens, constitutes the world's most frequent cause for blindness.
Efficient Ensemble Model Generation for Uncertainty Estimation with Bayesian Approximation in Segmentation
Experimental results show that the proposed method could provide useful uncertainty information by Bayesian approximation with the efficient ensemble model generation and improve the predictive performance.
Augment Yourself: Mixed Reality Self-Augmentation Using Optical See-through Head-mounted Displays and Physical Mirrors
Consequently, most MR applications that are centered around the user, such as virtual dressing rooms or learning of body movements, cannot be realized with HMDs.
Towards Unsupervised Learning for Instrument Segmentation in Robotic Surgery with Cycle-Consistent Adversarial Networks
Surgical tool segmentation in endoscopic images is an important problem: it is a crucial step towards full instrument pose estimation and it is used for integration of pre- and intra-operative images into the endoscopic view.

Searching for Efficient Architecture for Instrument Segmentation in Robotic Surgery
To account for reduced accuracy of the discovered light-weight deep residual network and avoid adding any additional computational burden, we perform a differentiable search over dilation rates for residual units of our network.
DynaMiTe: A Dynamic Local Motion Model with Temporal Constraints for Robust Real-Time Feature Matching
Feature based visual odometry and SLAM methods require accurate and fast correspondence matching between consecutive image frames for precise camera pose estimation in real-time.
Continual Class Incremental Learning for CT Thoracic Segmentation
In this work, we evaluate FT and LwF for class incremental learning in multi-organ segmentation using the publicly available AAPM dataset.

A Learning-based Method for Online Adjustment of C-arm Cone-Beam CT Source Trajectories for Artifact Avoidance
We propose to adjust the C-arm CBCT source trajectory during the scan to optimize reconstruction quality with respect to a certain task, i. e. verification of screw placement.
Inverse Distance Aggregation for Federated Learning with Non-IID Data
Federated learning (FL) has been a promising approach in the field of medical imaging in recent years.
Polyp-artifact relationship analysis using graph inductive learned representations
In inference, we use this classifier to analyze a second graph, generated from artifact and polyp predictions given by region proposal networks.
Multiple human pose estimation with temporally consistent 3d pictorial structures
To address these challenges, we propose a temporally consistent 3D Pictorial Structures model (3DPS) for multiple human pose estimation from multiple camera views.
 Ranked #16 on
3D Multi-Person Pose Estimation
on Campus
Ranked #16 on
3D Multi-Person Pose Estimation
on Campus
3D Pictorial Structures Revisited: Multiple Human Pose Estimation
We address the problem of 3D pose estimation of multiple humans from multiple views.
Ranked #15 on
3D Multi-Person Pose Estimation
on Campus
I Like to Move It: 6D Pose Estimation as an Action Decision Process
We change this paradigm and reformulate the problem as an action decision process where an initial pose is updated in incremental discrete steps that sequentially move a virtual 3D rendering towards the correct solution.
On Sparse Critical Paths of Neural Response
Is critical input information encoded in specific sparse paths within the network?
Meta-k: Towards Unsupervised Prediction of Number of Clusters
Data clustering is a well-known unsupervised learning approach.
Panoster: End-to-end Panoptic Segmentation of LiDAR Point Clouds
Panoptic segmentation has recently unified semantic and instance segmentation, previously addressed separately, thus taking a step further towards creating more comprehensive and efficient perception systems.

Surgical Data Science -- from Concepts toward Clinical Translation
We further complement this technical perspective with (4) a review of currently available SDS products and the translational progress from academia and (5) a roadmap for faster clinical translation and exploitation of the full potential of SDS, based on an international multi-round Delphi process.
Self-Supervised Out-of-Distribution Detection in Brain CT Scans
To address these issues, recently, unsupervised deep anomaly detection methods that train the model on large-sized normal scans and detect abnormal scans by calculating reconstruction error have been reported.

Pose-dependent weights and Domain Randomization for fully automatic X-ray to CT Registration
First, a neural network is trained once to detect a set of anatomical landmarks on simulated X-rays.
Rethinking Positive Aggregation and Propagation of Gradients in Gradient-based Saliency Methods
In this work, we empirically show that two approaches for handling the gradient information, namely positive aggregation, and positive propagation, break these methods.
OperA: Attention-Regularized Transformers for Surgical Phase Recognition
In this paper we introduce OperA, a transformer-based model that accurately predicts surgical phases from long video sequences.
Are we using appropriate segmentation metrics? Identifying correlates of human expert perception for CNN training beyond rolling the DICE coefficient
It is often unclear how to optimize abstract metrics, such as human expert perception, in convolutional neural network (CNN) training.

GLOWin: A Flow-based Invertible Generative Framework for Learning Disentangled Feature Representations in Medical Images
Disentangled representations can be useful in many downstream tasks, help to make deep learning models more interpretable, and allow for control over features of synthetically generated images that can be useful in training other models that require a large number of labelled or unlabelled data.
IA-GCN: Interpretable Attention based Graph Convolutional Network for Disease prediction
The main novelty lies in the interpretable attention module (IAM), which directly operates on multi-modal features.
Rethinking Ultrasound Augmentation: A Physics-Inspired Approach
Medical Ultrasound (US), despite its wide use, is characterized by artifacts and operator dependency.
Deep Direct Volume Rendering: Learning Visual Feature Mappings From Exemplary Images
In this work, we introduce Deep Direct Volume Rendering (DeepDVR), a generalization of DVR that allows for the integration of deep neural networks into the DVR algorithm.

Multimodal Semantic Scene Graphs for Holistic Modeling of Surgical Procedures
We then use MSSG to introduce a dynamically generated graphical user interface tool for surgical procedure analysis which could be used for many applications including process optimization, OR design and automatic report generation.
U-GAT: Multimodal Graph Attention Network for COVID-19 Outcome Prediction
Specifically, we introduce a multimodal similarity metric to build a population graph for clustering patients and an image-based end-to-end Graph Attention Network to process this graph and predict the COVID-19 patient outcomes: admission to ICU, need for ventilation and mortality.
R4Dyn: Exploring Radar for Self-Supervised Monocular Depth Estimation of Dynamic Scenes
While self-supervised monocular depth estimation in driving scenarios has achieved comparable performance to supervised approaches, violations of the static world assumption can still lead to erroneous depth predictions of traffic participants, posing a potential safety issue.


Unconditional Scene Graph Generation
Scene graphs, composed of nodes as objects and directed-edges as relationships among objects, offer an alternative representation of a scene that is more semantically grounded than images.
Tracked 3D Ultrasound and Deep Neural Network-based Thyroid Segmentation reduce Interobserver Variability in Thyroid Volumetry
Conclusion: Tracked 3D ultrasound combined with a CNN segmentation significantly reduces interobserver variability in thyroid volumetry and increases the accuracy of the measurements with shorter acquisition times.
Sickle Cell Disease Severity Prediction from Percoll Gradient Images using Graph Convolutional Networks
Sickle cell disease (SCD) is a severe genetic hemoglobin disorder that results in premature destruction of red blood cells.
MetaMedSeg: Volumetric Meta-learning for Few-Shot Organ Segmentation
In this work, we present MetaMedSeg, a gradient-based meta-learning algorithm that redefines the meta-learning task for the volumetric medical data with the goal to capture the variety between the slices.
Adversarial Domain Feature Adaptation for Bronchoscopic Depth Estimation
The results of our experiments show that the proposed method improves the network's performance on real images by a considerable margin and can be employed in 3D reconstruction pipelines.
CertainNet: Sampling-free Uncertainty Estimation for Object Detection
Estimating the uncertainty of a neural network plays a fundamental role in safety-critical settings.
Interactive Segmentation for COVID-19 Infection Quantification on Longitudinal CT scans
Existing automatic and interactive segmentation models for medical images only use data from a single time point (static).
Semantic Image Alignment for Vehicle Localization
Accurate and reliable localization is a fundamental requirement for autonomous vehicles to use map information in higher-level tasks such as navigation or planning.
Attention meets Geometry: Geometry Guided Spatial-Temporal Attention for Consistent Self-Supervised Monocular Depth Estimation
A novel temporal attention mechanism further processes the local geometric information in a global context across consecutive images.
ColibriDoc: An Eye-in-Hand Autonomous Trocar Docking System
For this purpose, we present a platform for autonomous trocar docking that combines computer vision and a robotic setup.
DemoGrasp: Few-Shot Learning for Robotic Grasping with Human Demonstration
We first present a small sequence of RGB-D images displaying a human-object interaction.
Wild ToFu: Improving Range and Quality of Indirect Time-of-Flight Depth with RGB Fusion in Challenging Environments
Indirect Time-of-Flight (I-ToF) imaging is a widespread way of depth estimation for mobile devices due to its small size and affordable price.
3D-VField: Adversarial Augmentation of Point Clouds for Domain Generalization in 3D Object Detection
Despite training only on a standard dataset, such as KITTI, augmenting with our vector fields significantly improves the generalization to differently shaped objects and scenes.
Transformers in Action: Weakly Supervised Action Segmentation
The video action segmentation task is regularly explored under weaker forms of supervision, such as transcript supervision, where a list of actions is easier to obtain than dense frame-wise labels.
Bending Graphs: Hierarchical Shape Matching using Gated Optimal Transport
Shape matching has been a long-studied problem for the computer graphics and vision community.
Do Explanations Explain? Model Knows Best
It is a mystery which input features contribute to a neural network's output.
From 2D to 3D: Re-thinking Benchmarking of Monocular Depth Prediction
There have been numerous recently proposed methods for monocular depth prediction (MDP) coupled with the equally rapid evolution of benchmarking tools.
Know your sensORs -- A Modality Study For Surgical Action Classification
Existing datasets from OR room cameras are thus far limited in size or modalities acquired, leaving it unclear which sensor modalities are best suited for tasks such as recognizing surgical action from videos.
Surgical Workflow Recognition: from Analysis of Challenges to Architectural Study
Algorithmic surgical workflow recognition is an ongoing research field and can be divided into laparoscopic (Internal) and operating room (External) analysis.
Longitudinal Self-Supervision for COVID-19 Pathology Quantification
For this purpose, longitudinal self-supervision schemes are explored on clinical longitudinal COVID-19 CT scans.

Conditional Generative Data Augmentation for Clinical Audio Datasets
In this work, we propose a novel data augmentation method for clinical audio datasets based on a conditional Wasserstein Generative Adversarial Network with Gradient Penalty (cWGAN-GP), operating on log-mel spectrograms.
FlexR: Few-shot Classification with Language Embeddings for Structured Reporting of Chest X-rays
The automation of chest X-ray reporting has garnered significant interest due to the time-consuming nature of the task.
Learning Local Displacements for Point Cloud Completion
To this aim, we introduce a second model that assembles our layers within a transformer architecture.
Graph-in-Graph (GiG): Learning interpretable latent graphs in non-Euclidean domain for biological and healthcare applications
In this work, we propose Graph-in-Graph (GiG), a neural network architecture for protein classification and brain imaging applications that exploits the graph representation of the input data samples and their latent relation.
Analyzing the Effects of Handling Data Imbalance on Learned Features from Medical Images by Looking Into the Models
One challenging property lurking in medical datasets is the imbalanced data distribution, where the frequency of the samples between the different classes is not balanced.
SoftPool++: An Encoder-Decoder Network for Point Cloud Completion
We propose a novel convolutional operator for the task of point cloud completion.
Affective Medical Estimation and Decision Making via Visualized Learning and Deep Learning
With the advent of sophisticated machine learning (ML) techniques and the promising results they yield, especially in medical applications, where they have been investigated for different tasks to enhance the decision-making process.
Weakly-supervised Biomechanically-constrained CT/MRI Registration of the Spine
We specifically design these losses to depend only on the CT label maps since automatic vertebra segmentation in CT gives more accurate results contrary to MRI.
PhoCaL: A Multi-Modal Dataset for Category-Level Object Pose Estimation with Photometrically Challenging Objects
Object pose estimation is crucial for robotic applications and augmented reality.
BFS-Net: Weakly Supervised Cell Instance Segmentation from Bright-Field Microscopy Z-Stacks
Despite its broad availability, volumetric information acquisition from Bright-Field Microscopy (BFM) is inherently difficult due to the projective nature of the acquisition process.
Virtual embeddings and self-consistency for self-supervised learning
We validate TriMix on eight benchmark datasets consisting of natural and medical images with an improvement of 2. 71% and 0. 41% better than the second-best models for both data types.

U-PET: MRI-based Dementia Detection with Joint Generation of Synthetic FDG-PET Images
To this end, we propose a multi-task method based on U-Net that takes T1-weighted MR images as an input to generate synthetic FDG-PET images and classifies the dementia progression of the patient into cognitive normal (CN), cognitive impairment (MCI), and AD.
DeStripe: A Self2Self Spatio-Spectral Graph Neural Network with Unfolded Hessian for Stripe Artifact Removal in Light-sheet Microscopy
Light-sheet fluorescence microscopy (LSFM) is a cutting-edge volumetric imaging technique that allows for three-dimensional imaging of mesoscopic samples with decoupled illumination and detection paths.
Adaptive Personlization in Federated Learning for Highly Non-i.i.d. Data
Although most medical centers conduct similar medical imaging tasks, their differences, such as specializations, number of patients, and devices, lead to distinctive data distributions.
Shape-Aware Masking for Inpainting in Medical Imaging
Inpainting has recently been proposed as a successful deep learning technique for unsupervised medical image model discovery.
Exploiting Diversity of Unlabeled Data for Label-Efficient Semi-Supervised Active Learning
By considering the consistency information with the diversity in the consistency-based embedding scheme, the proposed method could select more informative samples for labeling in the semi-supervised learning setting.
Spotlight on nerves: Portable multispectral optoacoustic imaging of peripheral nerve vascularization and morphology
Various morphological and functional parameters of peripheral nerves and their vascular supply are indicative of pathological changes due to injury or disease.
CloudAttention: Efficient Multi-Scale Attention Scheme For 3D Point Cloud Learning
The proposed hierarchical model achieves state-of-the-art shape classification in mean accuracy and yields results on par with the previous segmentation methods while requiring significantly fewer computations.

DA$^2$ Dataset: Toward Dexterity-Aware Dual-Arm Grasping
In this paper, we introduce DA$^2$, the first large-scale dual-arm dexterity-aware dataset for the generation of optimal bimanual grasping pairs for arbitrary large objects.
Segmenting Known Objects and Unseen Unknowns without Prior Knowledge
By doing so, for the first time in panoptic segmentation with unknown objects, our U3HS is trained without unknown categories, reducing assumptions and leaving the settings as unconstrained as in real-life scenarios.

MonoGraspNet: 6-DoF Grasping with a Single RGB Image
6-DoF robotic grasping is a long-lasting but unsolved problem.
What can we learn about a generated image corrupting its latent representation?
The purpose of this work is to investigate the hypothesis that we can predict image quality based on its latent representation in the GANs bottleneck.
Improved Techniques for the Conditional Generative Augmentation of Clinical Audio Data
In contrast to previously proposed fully convolutional models, the proposed model implements residual Squeeze and Excitation modules in the generator architecture.
DisPositioNet: Disentangled Pose and Identity in Semantic Image Manipulation
Graph representation of objects and their relations in a scene, known as a scene graph, provides a precise and discernible interface to manipulate a scene by modifying the nodes or the edges in the graph.
TexPose: Neural Texture Learning for Self-Supervised 6D Object Pose Estimation
In this paper, we introduce neural texture learning for 6D object pose estimation from synthetic data and a few unlabelled real images.
Robotic Navigation Autonomy for Subretinal Injection via Intelligent Real-Time Virtual iOCT Volume Slicing
In this work, we propose a framework for autonomous robotic navigation for subretinal injection, based on intelligent real-time processing of iOCT volumes.

Lidar Upsampling with Sliced Wasserstein Distance
This in turn enables our method to employ a one-stage upsampling paradigm without the need for coarse and fine reconstruction.
