Search Results for author:
Found 192 papers, 56 papers with code
PhysDreamer: Physics-Based Interaction with 3D Objects via Video Generation
Unlike unconditional or text-conditioned dynamics generation, action-conditioned dynamics requires perceiving the physical material properties of objects and grounding the 3D motion prediction on these properties, such as object stiffness.
Tripod: Three Complementary Inductive Biases for Disentangled Representation Learning
Inductive biases are crucial in disentangled representation learning for narrowing down an underspecified solution set.
Text-Based Reasoning About Vector Graphics
By casting an image to a text-based representation, we can leverage the power of language models to learn alignment from SVG to visual primitives and generalize to unseen question-answering tasks.

3D Congealing: 3D-Aware Image Alignment in the Wild
The framework optimizes for the canonical representation together with the pose for each input image, and a per-image coordinate map that warps 2D pixel coordinates to the 3D canonical frame to account for the shape matching.

BEHAVIOR-1K: A Human-Centered, Embodied AI Benchmark with 1,000 Everyday Activities and Realistic Simulation
We present BEHAVIOR-1K, a comprehensive simulation benchmark for human-centered robotics.
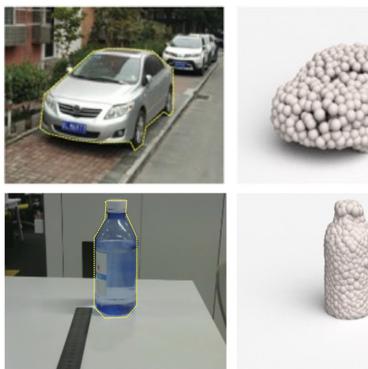
Reconstruction and Simulation of Elastic Objects with Spring-Mass 3D Gaussians
In particular, we develop and integrate a 3D Spring-Mass model into 3D Gaussian kernels, enabling the reconstruction of the visual appearance, shape, and physical dynamics of the object.
Unsupervised Discovery of Object-Centric Neural Fields
Extensive experiments show that uOCF enables unsupervised discovery of visually rich objects from a single real image, allowing applications such as 3D object segmentation and scene manipulation.
Learning the 3D Fauna of the Web
We show that prior category-specific attempts fail to generalize to rare species with limited training images.
CityPulse: Fine-Grained Assessment of Urban Change with Street View Time Series
Urban transformations have profound societal impact on both individuals and communities at large.

Fluid Simulation on Neural Flow Maps
We introduce Neural Flow Maps, a novel simulation method bridging the emerging paradigm of implicit neural representations with fluid simulation based on the theory of flow maps, to achieve state-of-the-art simulation of inviscid fluid phenomena.
Ponymation: Learning 3D Animal Motions from Unlabeled Online Videos
We introduce Ponymation, a new method for learning a generative model of articulated 3D animal motions from raw, unlabeled online videos.

Model-Based Control with Sparse Neural Dynamics
In this paper, we propose a new framework for integrated model learning and predictive control that is amenable to efficient optimization algorithms.
SkyScript: A Large and Semantically Diverse Vision-Language Dataset for Remote Sensing
Remote sensing imagery, despite its broad applications in helping achieve Sustainable Development Goals and tackle climate change, has not yet benefited from the recent advancements of versatile, task-agnostic vision language models (VLMs).
Holodeck: Language Guided Generation of 3D Embodied AI Environments
3D simulated environments play a critical role in Embodied AI, but their creation requires expertise and extensive manual effort, restricting their diversity and scope.
Inferring Hybrid Neural Fluid Fields from Videos
Specifically, to deal with visual ambiguities of fluid velocity, we introduce a set of physics-based losses that enforce inferring a physically plausible velocity field, which is divergence-free and drives the transport of density.
3D Copy-Paste: Physically Plausible Object Insertion for Monocular 3D Detection
A major challenge in monocular 3D object detection is the limited diversity and quantity of objects in real datasets.

Controllable Human-Object Interaction Synthesis
Naively applying a diffusion model fails to predict object motion aligned with the input waypoints and cannot ensure the realism of interactions that require precise hand-object contact and appropriate contact grounded by the floor.
WonderJourney: Going from Anywhere to Everywhere
We introduce WonderJourney, a modularized framework for perpetual 3D scene generation.
Language-Informed Visual Concept Learning
To encourage better disentanglement of different concept encoders, we anchor the concept embeddings to a set of text embeddings obtained from a pre-trained Visual Question Answering (VQA) model.
Holistic Evaluation of Text-To-Image Models
The stunning qualitative improvement of recent text-to-image models has led to their widespread attention and adoption.
SoundCam: A Dataset for Finding Humans Using Room Acoustics
A room's acoustic properties are a product of the room's geometry, the objects within the room, and their specific positions.
NOIR: Neural Signal Operated Intelligent Robots for Everyday Activities
We present Neural Signal Operated Intelligent Robots (NOIR), a general-purpose, intelligent brain-robot interface system that enables humans to command robots to perform everyday activities through brain signals.

Learning to Design and Use Tools for Robotic Manipulation
A designer policy is conditioned on task information and outputs a tool design that helps solve the task.
ZeroNVS: Zero-Shot 360-Degree View Synthesis from a Single Image
Further, we observe that Score Distillation Sampling (SDS) tends to truncate the distribution of complex backgrounds during distillation of 360-degree scenes, and propose "SDS anchoring" to improve the diversity of synthesized novel views.

Stanford-ORB: A Real-World 3D Object Inverse Rendering Benchmark
We introduce Stanford-ORB, a new real-world 3D Object inverse Rendering Benchmark.
What's Left? Concept Grounding with Logic-Enhanced Foundation Models
We propose the Logic-Enhanced Foundation Model (LEFT), a unified framework that learns to ground and reason with concepts across domains with a differentiable, domain-independent, first-order logic-based program executor.
CLEVRER-Humans: Describing Physical and Causal Events the Human Way
First, there is a lack of diversity in both event types and natural language descriptions; second, causal relationships based on manually-defined heuristics are different from human judgments.
Mini-BEHAVIOR: A Procedurally Generated Benchmark for Long-horizon Decision-Making in Embodied AI
We present Mini-BEHAVIOR, a novel benchmark for embodied AI that challenges agents to use reasoning and decision-making skills to solve complex activities that resemble everyday human challenges.
D$^3$Fields: Dynamic 3D Descriptor Fields for Zero-Shot Generalizable Robotic Manipulation
These fields capture the dynamics of the underlying 3D environment and encode both semantic features and instance masks.
Object Motion Guided Human Motion Synthesis
We propose Object MOtion guided human MOtion synthesis (OMOMO), a conditional diffusion framework that can generate full-body manipulation behaviors from only the object motion.

Tree-Structured Shading Decomposition
The shade tree representation enables novice users who are unfamiliar with the physical shading process to edit object shading in an efficient and intuitive manner.
Learning Sequential Acquisition Policies for Robot-Assisted Feeding
A robot providing mealtime assistance must perform specialized maneuvers with various utensils in order to pick up and feed a range of food items.
Physically Grounded Vision-Language Models for Robotic Manipulation
We incorporate this physically grounded VLM in an interactive framework with a large language model-based robotic planner, and show improved planning performance on tasks that require reasoning about physical object concepts, compared to baselines that do not leverage physically grounded VLMs.

Compositional Diffusion-Based Continuous Constraint Solvers
This paper introduces an approach for learning to solve continuous constraint satisfaction problems (CCSP) in robotic reasoning and planning.
Rendering Humans from Object-Occluded Monocular Videos
3D understanding and rendering of moving humans from monocular videos is a challenging task.
Patched Denoising Diffusion Models For High-Resolution Image Synthesis
Feature collage systematically crops and combines partial features of the neighboring patches to predict the features of a shifted image patch, allowing the seamless generation of the entire image due to the overlap in the patch feature space.

Primitive Skill-based Robot Learning from Human Evaluative Feedback
By combining them, SEED reduces the human effort required in RLHF and increases safety in training robot manipulation with RL in real-world settings.
VoxPoser: Composable 3D Value Maps for Robotic Manipulation with Language Models
The composed value maps are then used in a model-based planning framework to zero-shot synthesize closed-loop robot trajectories with robustness to dynamic perturbations.
Giving Robots a Hand: Learning Generalizable Manipulation with Eye-in-Hand Human Video Demonstrations
Eye-in-hand cameras have shown promise in enabling greater sample efficiency and generalization in vision-based robotic manipulation.

Dynamic-Resolution Model Learning for Object Pile Manipulation
Prior works typically assume representation at a fixed dimension or resolution, which may be inefficient for simple tasks and ineffective for more complicated tasks.
Task-Driven Graph Attention for Hierarchical Relational Object Navigation
Embodied AI agents in large scenes often need to navigate to find objects.
RealImpact: A Dataset of Impact Sound Fields for Real Objects
Objects make unique sounds under different perturbations, environment conditions, and poses relative to the listener.
Multi-Object Manipulation via Object-Centric Neural Scattering Functions
Learned visual dynamics models have proven effective for robotic manipulation tasks.
HomE: Homography-Equivariant Video Representation Learning
In this work, we propose a novel method for representation learning of multi-view videos, where we explicitly model the representation space to maintain Homography Equivariance (HomE).


Sonicverse: A Multisensory Simulation Platform for Embodied Household Agents that See and Hear
We introduce Sonicverse, a multisensory simulation platform with integrated audio-visual simulation for training household agents that can both see and hear.

The ObjectFolder Benchmark: Multisensory Learning with Neural and Real Objects
We introduce the ObjectFolder Benchmark, a benchmark suite of 10 tasks for multisensory object-centric learning, centered around object recognition, reconstruction, and manipulation with sight, sound, and touch.
Disentanglement via Latent Quantization
In this work, we construct an inductive bias towards encoding to and decoding from an organized latent space.
Modeling Dynamic Environments with Scene Graph Memory
We evaluate our method in the Dynamic House Simulator, a new benchmark that creates diverse dynamic graphs following the semantic patterns typically seen at homes, and show that NEP can be trained to predict the locations of objects in a variety of environments with diverse object movement dynamics, outperforming baselines both in terms of new scene adaptability and overall accuracy.

Motion Question Answering via Modular Motion Programs
In order to build artificial intelligence systems that can perceive and reason with human behavior in the real world, we must first design models that conduct complex spatio-temporal reasoning over motion sequences.

ULIP-2: Towards Scalable Multimodal Pre-training for 3D Understanding
Recent advancements in multimodal pre-training methods have shown promising efficacy in 3D representation learning by aligning multimodal features across 3D shapes, their 2D counterparts, and language descriptions.
 Ranked #6 on
3D Point Cloud Classification
on ScanObjectNN
(using extra training data)
Ranked #6 on
3D Point Cloud Classification
on ScanObjectNN
(using extra training data)


An Extensible Multimodal Multi-task Object Dataset with Materials
For example, we can train a model to predict the object category from the listing text, or the mass and price from the product listing image.
Putting People in Their Place: Affordance-Aware Human Insertion into Scenes
Given a scene image with a marked region and an image of a person, we insert the person into the scene while respecting the scene affordances.
Programmatically Grounded, Compositionally Generalizable Robotic Manipulation
Robots operating in the real world require both rich manipulation skills as well as the ability to semantically reason about when to apply those skills.
A Control-Centric Benchmark for Video Prediction
Video is a promising source of knowledge for embodied agents to learn models of the world's dynamics.

Partial-View Object View Synthesis via Filtered Inversion
At inference, given one or more views of a novel real-world object, FINV first finds a set of latent codes for the object by inverting the generative model from multiple initial seeds.
CIRCLE: Capture In Rich Contextual Environments
Leveraging our dataset, the model learns to use ego-centric scene information to achieve nontrivial reaching tasks in the context of complex 3D scenes.
NS3D: Neuro-Symbolic Grounding of 3D Objects and Relations
Different functional modules in the programs are implemented as neural networks.
Learning Object-Centric Neural Scattering Functions for Free-Viewpoint Relighting and Scene Composition
We propose Object-Centric Neural Scattering Functions (OSFs) for learning to reconstruct object appearance from only images.
Learning Rational Subgoals from Demonstrations and Instructions
We present a framework for learning useful subgoals that support efficient long-term planning to achieve novel goals.
Sparse and Local Networks for Hypergraph Reasoning
Reasoning about the relationships between entities from input facts (e. g., whether Ari is a grandparent of Charlie) generally requires explicit consideration of other entities that are not mentioned in the query (e. g., the parents of Charlie).
DyBit: Dynamic Bit-Precision Numbers for Efficient Quantized Neural Network Inference
To accelerate the inference of deep neural networks (DNNs), quantization with low-bitwidth numbers is actively researched.
VQ3D: Learning a 3D-Aware Generative Model on ImageNet
Recent work has shown the possibility of training generative models of 3D content from 2D image collections on small datasets corresponding to a single object class, such as human faces, animal faces, or cars.
FedLE: Federated Learning Client Selection with Lifespan Extension for Edge IoT Networks
One major challenge preventing the wide adoption of FL in IoT is the pervasive power supply constraints of IoT devices due to the intensive energy consumption of battery-powered clients for local training and model updates.
Topology-aware Federated Learning in Edge Computing: A Comprehensive Survey
The ultra-low latency requirements of 5G/6G applications and privacy constraints call for distributed machine learning systems to be deployed at the edge.
IKEA-Manual: Seeing Shape Assembly Step by Step
Human-designed visual manuals are crucial components in shape assembly activities.
Learning Vortex Dynamics for Fluid Inference and Prediction
We propose a novel differentiable vortex particle (DVP) method to infer and predict fluid dynamics from a single video.
Accidental Light Probes
Recovering lighting in a scene from a single image is a fundamental problem in computer vision.
Scene Synthesis from Human Motion
Large-scale capture of human motion with diverse, complex scenes, while immensely useful, is often considered prohibitively costly.
 Ranked #3 on
3D Semantic Scene Completion
on PRO-teXt
Ranked #3 on
3D Semantic Scene Completion
on PRO-teXt
 2D Semantic Segmentation task 1 (8 classes)
2D Semantic Segmentation task 1 (8 classes)
 3D Semantic Scene Completion
+1
3D Semantic Scene Completion
+1
ULIP: Learning a Unified Representation of Language, Images, and Point Clouds for 3D Understanding
Then, ULIP learns a 3D representation space aligned with the common image-text space, using a small number of automatically synthesized triplets.
 Ranked #3 on
Training-free 3D Point Cloud Classification
on ModelNet40
(using extra training data)
Ranked #3 on
Training-free 3D Point Cloud Classification
on ModelNet40
(using extra training data)
Physically Plausible Animation of Human Upper Body from a Single Image
We present a new method for generating controllable, dynamically responsive, and photorealistic human animations.
Ego-Body Pose Estimation via Ego-Head Pose Estimation
In addition, collecting large-scale, high-quality datasets with paired egocentric videos and 3D human motions requires accurate motion capture devices, which often limit the variety of scenes in the videos to lab-like environments.
Seeing a Rose in Five Thousand Ways
These instances all share the same intrinsics, but appear different due to a combination of variance within these intrinsics and differences in extrinsic factors, such as pose and illumination.
See, Hear, and Feel: Smart Sensory Fusion for Robotic Manipulation
Humans use all of their senses to accomplish different tasks in everyday activities.
E-MAPP: Efficient Multi-Agent Reinforcement Learning with Parallel Program Guidance
Specifically, we introduce Efficient Multi-Agent Reinforcement Learning with Parallel Program Guidance(E-MAPP), a novel framework that leverages parallel programs to guide multiple agents to efficiently accomplish goals that require planning over $10+$ stages.
Multi-agent Reinforcement Learning
reinforcement-learning
+2
Geoclidean: Few-Shot Generalization in Euclidean Geometry
In contrast, low-level and high-level visual features from standard computer vision models pretrained on natural images do not support correct generalization.
3D Neural Field Generation using Triplane Diffusion
Diffusion models have emerged as the state-of-the-art for image generation, among other tasks.
STAP: Sequencing Task-Agnostic Policies
We further demonstrate how STAP can be used for task and motion planning by estimating the geometric feasibility of skill sequences provided by a task planner.

Differentiable Physics Simulation of Dynamics-Augmented Neural Objects
A robot can use this simulation to optimize grasps and manipulation trajectories of neural objects, or to improve the neural object models through gradient-based real-to-simulation transfer.
Retrospectives on the Embodied AI Workshop
We present a retrospective on the state of Embodied AI research.
Interaction Modeling with Multiplex Attention
Modeling multi-agent systems requires understanding how agents interact.

Translating a Visual LEGO Manual to a Machine-Executable Plan
We study the problem of translating an image-based, step-by-step assembly manual created by human designers into machine-interpretable instructions.


Programmatic Concept Learning for Human Motion Description and Synthesis
We introduce Programmatic Motion Concepts, a hierarchical motion representation for human actions that captures both low-level motion and high-level description as motion concepts.
MaskViT: Masked Visual Pre-Training for Video Prediction
This work shows that we can create good video prediction models by pre-training transformers via masked visual modeling.
BEHAVIOR in Habitat 2.0: Simulator-Independent Logical Task Description for Benchmarking Embodied AI Agents
Robots excel in performing repetitive and precision-sensitive tasks in controlled environments such as warehouses and factories, but have not been yet extended to embodied AI agents providing assistance in household tasks.
Revisiting the "Video" in Video-Language Understanding
Building on recent progress in self-supervised image-language models, we revisit this question in the context of video and language tasks.
 Ranked #1 on
Video Question Answering
on MSR-VTT-MC
Ranked #1 on
Video Question Answering
on MSR-VTT-MC
Unsupervised Segmentation in Real-World Images via Spelke Object Inference
Self-supervised, category-agnostic segmentation of real-world images is a challenging open problem in computer vision.

Unsupervised Discovery and Composition of Object Light Fields
Neural scene representations, both continuous and discrete, have recently emerged as a powerful new paradigm for 3D scene understanding.
RoboCraft: Learning to See, Simulate, and Shape Elasto-Plastic Objects with Graph Networks
Our learned model-based planning framework is comparable to and sometimes better than human subjects on the tested tasks.
Video Extrapolation in Space and Time
Novel view synthesis (NVS) and video prediction (VP) are typically considered disjoint tasks in computer vision.
Rotationally Equivariant 3D Object Detection
To incorporate object-level rotation equivariance into 3D object detectors, we need a mechanism to extract equivariant features with local object-level spatial support while being able to model cross-object context information.


ObjectFolder 2.0: A Multisensory Object Dataset for Sim2Real Transfer
We present ObjectFolder 2. 0, a large-scale, multisensory dataset of common household objects in the form of implicit neural representations that significantly enhances ObjectFolder 1. 0 in three aspects.
Vision-Based Manipulators Need to Also See from Their Hands
We study how the choice of visual perspective affects learning and generalization in the context of physical manipulation from raw sensor observations.
Grammar-Based Grounded Lexicon Learning
We present Grammar-Based Grounded Lexicon Learning (G2L2), a lexicalist approach toward learning a compositional and grounded meaning representation of language from grounded data, such as paired images and texts.
Universal Controllers with Differentiable Physics for Online System Identification
In addition, we perform two studies showing that UC-DiffOSI operates well in environments with changing or unknown dynamics.
Efficient Training and Inference of Hypergraph Reasoning Networks
To leverage the sparsity in hypergraph neural networks, SpaLoc represents the grounding of relationships such as parent and grandparent as sparse tensors and uses neural networks and finite-domain quantification operations to infer new facts based on the input.
Learning Rational Skills for Planning from Demonstrations and Instructions
We present a framework for learning compositional, rational skill models (RatSkills) that support efficient planning and inverse planning for achieving novel goals and recognizing activities.
ObjectFolder: A Dataset of Objects with Implicit Visual, Auditory, and Tactile Representations
Multisensory object-centric perception, reasoning, and interaction have been a key research topic in recent years.
On the Opportunities and Risks of Foundation Models
AI is undergoing a paradigm shift with the rise of models (e. g., BERT, DALL-E, GPT-3) that are trained on broad data at scale and are adaptable to a wide range of downstream tasks.

BEHAVIOR: Benchmark for Everyday Household Activities in Virtual, Interactive, and Ecological Environments
We introduce BEHAVIOR, a benchmark for embodied AI with 100 activities in simulation, spanning a range of everyday household chores such as cleaning, maintenance, and food preparation.
iGibson 2.0: Object-Centric Simulation for Robot Learning of Everyday Household Tasks
We evaluate the new capabilities of iGibson 2. 0 to enable robot learning of novel tasks, in the hope of demonstrating the potential of this new simulator to support new research in embodied AI.
SDEdit: Guided Image Synthesis and Editing with Stochastic Differential Equations
The key challenge is balancing faithfulness to the user input (e. g., hand-drawn colored strokes) and realism of the synthesized image.
Unsupervised Discovery of Object Radiance Fields
We study the problem of inferring an object-centric scene representation from a single image, aiming to derive a representation that explains the image formation process, captures the scene's 3D nature, and is learned without supervision.
Temporal and Object Quantification Networks
We present Temporal and Object Quantification Networks (TOQ-Nets), a new class of neuro-symbolic networks with a structural bias that enables them to learn to recognize complex relational-temporal events.

KeypointDeformer: Unsupervised 3D Keypoint Discovery for Shape Control
We cast this as the problem of aligning a source 3D object to a target 3D object from the same object category.
Hierarchical Motion Understanding via Motion Programs
We posit that adding higher-level motion primitives, which can capture natural coarser units of motion such as backswing or follow-through, can be used to improve downstream analysis tasks.
3D Shape Generation and Completion through Point-Voxel Diffusion
We propose a novel approach for probabilistic generative modeling of 3D shapes.

De-rendering the World's Revolutionary Artefacts
Recent works have shown exciting results in unsupervised image de-rendering -- learning to decompose 3D shape, appearance, and lighting from single-image collections without explicit supervision.
Repopulating Street Scenes
We present a framework for automatically reconfiguring images of street scenes by populating, depopulating, or repopulating them with objects such as pedestrians or vehicles.
Grounding Physical Concepts of Objects and Events Through Dynamic Visual Reasoning
We study the problem of dynamic visual reasoning on raw videos.
Learning Temporal Dynamics from Cycles in Narrated Video
Learning to model how the world changes as time elapses has proven a challenging problem for the computer vision community.
Grounding Physical Object and Event Concepts Through Dynamic Visual Reasoning
We study the problem of dynamic visual reasoning on raw videos.
Unsupervised Discovery of 3D Physical Objects
We study the problem of unsupervised physical object discovery.
Temporal and Object Quantification Nets
We aim to learn generalizable representations for complex activities by quantifying over both entities and time, as in “the kicker is behind all the other players,” or “the player controls the ball until it moves toward the goal.” Such a structural inductive bias of object relations, object quantification, and temporal orders will enable the learned representation to generalize to situations with varying numbers of agents, objects, and time courses.
Language-Mediated, Object-Centric Representation Learning
These object-centric concepts derived from language facilitate the learning of object-centric representations.
Augmenting Policy Learning with Routines Discovered from a Single Demonstration
Humans can abstract prior knowledge from very little data and use it to boost skill learning.

Object-Centric Diagnosis of Visual Reasoning
In contrast, symbolic and modular models have a relatively better grounding and robustness, though at the cost of accuracy.
Neural Radiance Flow for 4D View Synthesis and Video Processing
We present a method, Neural Radiance Flow (NeRFlow), to learn a 4D spatial-temporal representation of a dynamic scene from a set of RGB images.

Object-Centric Neural Scene Rendering
We present a method for composing photorealistic scenes from captured images of objects.
pi-GAN: Periodic Implicit Generative Adversarial Networks for 3D-Aware Image Synthesis
We have witnessed rapid progress on 3D-aware image synthesis, leveraging recent advances in generative visual models and neural rendering.
 Ranked #3 on
Scene Generation
on VizDoom
Ranked #3 on
Scene Generation
on VizDoom
Multi-Plane Program Induction with 3D Box Priors
We consider two important aspects in understanding and editing images: modeling regular, program-like texture or patterns in 2D planes, and 3D posing of these planes in the scene.
Learning 3D Dynamic Scene Representations for Robot Manipulation
3D scene representation for robot manipulation should capture three key object properties: permanency -- objects that become occluded over time continue to exist; amodal completeness -- objects have 3D occupancy, even if only partial observations are available; spatiotemporal continuity -- the movement of each object is continuous over space and time.
Multi-Frame to Single-Frame: Knowledge Distillation for 3D Object Detection
A common dilemma in 3D object detection for autonomous driving is that high-quality, dense point clouds are only available during training, but not testing.
Unsupervised Discovery of 3D Physical Objects from Video
We study the problem of unsupervised physical object discovery.
End-to-End Optimization of Scene Layout
Experiments suggest that our model achieves higher accuracy and diversity in conditional scene synthesis and allows exemplar-based scene generation from various input forms.
Perspective Plane Program Induction from a Single Image
We study the inverse graphics problem of inferring a holistic representation for natural images.
Learning Physical Graph Representations from Visual Scenes
To overcome these limitations, we introduce the idea of Physical Scene Graphs (PSGs), which represent scenes as hierarchical graphs, with nodes in the hierarchy corresponding intuitively to object parts at different scales, and edges to physical connections between parts.
When is Particle Filtering Efficient for Planning in Partially Observed Linear Dynamical Systems?
Though errors in past actions may affect the future, we are able to bound the number of particles needed so that the long-run reward of the policy based on particle filtering is close to that based on exact inference.
Improving Learning Efficiency for Wireless Resource Allocation with Symmetric Prior
The samples required to train a DNN after ranking can be reduced by $15 \sim 2, 400$ folds to achieve the same system performance as the counterpart without using prior.
Deep Audio Priors Emerge From Harmonic Convolutional Networks
We show that networks using Harmonic Convolution can reliably model audio priors and achieve high performance in unsupervised audio restoration tasks.
Visual Grounding of Learned Physical Models
The abilities to perform physical reasoning and to adapt to new environments, while intrinsic to humans, remain challenging to state-of-the-art computational models.

Visual Concept-Metaconcept Learning
Humans reason with concepts and metaconcepts: we recognize red and green from visual input; we also understand that they describe the same property of objects (i. e., the color).
Look, Listen, and Act: Towards Audio-Visual Embodied Navigation
In this paper, we attempt to approach the problem of Audio-Visual Embodied Navigation, the task of planning the shortest path from a random starting location in a scene to the sound source in an indoor environment, given only raw egocentric visual and audio sensory data.
Modeling Expectation Violation in Intuitive Physics with Coarse Probabilistic Object Representations
We also present a new test set for measuring violations of physical expectations, using a range of scenarios derived from developmental psychology.
Accurate Vision-based Manipulation through Contact Reasoning
Planning contact interactions is one of the core challenges of many robotic tasks.
Proactive Optimization with Machine Learning: Femto-caching with Future Content Popularity
In this paper, we introduce a proactive optimization framework for anticipatory resource allocation, where the future information is implicitly predicted under the same objective with the policy optimization in a single step.
Entity Abstraction in Visual Model-Based Reinforcement Learning
This paper tests the hypothesis that modeling a scene in terms of entities and their local interactions, as opposed to modeling the scene globally, provides a significant benefit in generalizing to physical tasks in a combinatorial space the learner has not encountered before.
Learning Compositional Koopman Operators for Model-Based Control
Finding an embedding space for a linear approximation of a nonlinear dynamical system enables efficient system identification and control synthesis.
CLEVRER: CoLlision Events for Video REpresentation and Reasoning
While these models thrive on the perception-based task (descriptive), they perform poorly on the causal tasks (explanatory, predictive and counterfactual), suggesting that a principled approach for causal reasoning should incorporate the capability of both perceiving complex visual and language inputs, and understanding the underlying dynamics and causal relations.
DualSMC: Tunneling Differentiable Filtering and Planning under Continuous POMDPs
A major difficulty of solving continuous POMDPs is to infer the multi-modal distribution of the unobserved true states and to make the planning algorithm dependent on the perceived uncertainty.
Program-Guided Image Manipulators
Humans are capable of building holistic representations for images at various levels, from local objects, to pairwise relations, to global structures.

Neurally-Guided Structure Inference
In this paper, we propose a hybrid inference algorithm, the Neurally-Guided Structure Inference (NG-SI), keeping the advantages of both search-based and data-driven methods.
Modeling Parts, Structure, and System Dynamics via Predictive Learning
Humans easily recognize object parts and their hierarchical structure by watching how they move; they can then predict how each part moves in the future.
Learning to Describe Scenes with Programs
We are able to understand the higher-level, abstract regularities within the scene such as symmetry and repetition.
Reasoning About Physical Interactions with Object-Centric Models
Object-based factorizations provide a useful level of abstraction for interacting with the world.
Predicting the Present and Future States of Multi-agent Systems from Partially-observed Visual Data
We present a method which learns to integrate temporal information, from a learned dynamics model, with ambiguous visual information, from a learned vision model, in the context of interacting agents.
The Neuro-Symbolic Concept Learner: Interpreting Scenes, Words, and Sentences From Natural Supervision
To bridge the learning of two modules, we use a neuro-symbolic reasoning module that executes these programs on the latent scene representation.
 Ranked #5 on
Visual Question Answering (VQA)
on CLEVR
Ranked #5 on
Visual Question Answering (VQA)
on CLEVR
Combining Physical Simulators and Object-Based Networks for Control
Physics engines play an important role in robot planning and control; however, many real-world control problems involve complex contact dynamics that cannot be characterized analytically.
Unsupervised Discovery of Parts, Structure, and Dynamics
Humans easily recognize object parts and their hierarchical structure by watching how they move; they can then predict how each part moves in the future.
Stochastic Prediction of Multi-Agent Interactions from Partial Observations
We present a method that learns to integrate temporal information, from a learned dynamics model, with ambiguous visual information, from a learned vision model, in the context of interacting agents.
Learning to Infer and Execute 3D Shape Programs
Human perception of 3D shapes goes beyond reconstructing them as a set of points or a composition of geometric primitives: we also effortlessly understand higher-level shape structure such as the repetition and reflective symmetry of object parts.
Reasoning About Physical Interactions with Object-Oriented Prediction and Planning
Object-based factorizations provide a useful level of abstraction for interacting with the world.
Learning to Reconstruct Shapes from Unseen Classes
From a single image, humans are able to perceive the full 3D shape of an object by exploiting learned shape priors from everyday life.
Visual Object Networks: Image Generation with Disentangled 3D Representation
Our model first learns to synthesize 3D shapes that are indistinguishable from real shapes.
Learning to Exploit Stability for 3D Scene Parsing
We first show that applying physics supervision to an existing scene understanding model increases performance, produces more stable predictions, and allows training to an equivalent performance level with fewer annotated training examples.
Visual Object Networks: Image Generation with Disentangled 3D Representations
The VON not only generates images that are more realistic than the state-of-the-art 2D image synthesis methods but also enables many 3D operations such as changing the viewpoint of a generated image, shape and texture editing, linear interpolation in texture and shape space, and transferring appearance across different objects and viewpoints.
Neural-Symbolic VQA: Disentangling Reasoning from Vision and Language Understanding
Second, the model is more data- and memory-efficient: it performs well after learning on a small number of training data; it can also encode an image into a compact representation, requiring less storage than existing methods for offline question answering.
Ranked #1 on
Visual Question Answering (VQA)
on CLEVR
Learning Particle Dynamics for Manipulating Rigid Bodies, Deformable Objects, and Fluids
In this paper, we propose to learn a particle-based simulator for complex control tasks.
ChainQueen: A Real-Time Differentiable Physical Simulator for Soft Robotics
The underlying physical laws of deformable objects are more complex, and the resulting systems have orders of magnitude more degrees of freedom and therefore they are significantly more computationally expensive to simulate.
Propagation Networks for Model-Based Control Under Partial Observation
There has been an increasing interest in learning dynamics simulators for model-based control.
MoSculp: Interactive Visualization of Shape and Time
We present a system that allows users to visualize complex human motion via 3D motion sculptures---a representation that conveys the 3D structure swept by a human body as it moves through space.
Seeing Tree Structure from Vibration
Humans recognize object structure from both their appearance and motion; often, motion helps to resolve ambiguities in object structure that arise when we observe object appearance only.

Learning Shape Priors for Single-View 3D Completion and Reconstruction
The problem of single-view 3D shape completion or reconstruction is challenging, because among the many possible shapes that explain an observation, most are implausible and do not correspond to natural objects.
Physical Primitive Decomposition
As annotated data for object parts and physics are rare, we propose a novel formulation that learns physical primitives by explaining both an object's appearance and its behaviors in physical events.
3D-Aware Scene Manipulation via Inverse Graphics
In this work, we propose 3D scene de-rendering networks (3D-SDN) to address the above issues by integrating disentangled representations for semantics, geometry, and appearance into a deep generative model.
3D Shape Perception from Monocular Vision, Touch, and Shape Priors
Perceiving accurate 3D object shape is important for robots to interact with the physical world.
Augmenting Physical Simulators with Stochastic Neural Networks: Case Study of Planar Pushing and Bouncing
An efficient, generalizable physical simulator with universal uncertainty estimates has wide applications in robot state estimation, planning, and control.
Unsupervised Learning of Latent Physical Properties Using Perception-Prediction Networks
We propose a framework for the completely unsupervised learning of latent object properties from their interactions: the perception-prediction network (PPN).
Visual Dynamics: Stochastic Future Generation via Layered Cross Convolutional Networks
We study the problem of synthesizing a number of likely future frames from a single input image.
Pix3D: Dataset and Methods for Single-Image 3D Shape Modeling
We study 3D shape modeling from a single image and make contributions to it in three aspects.
 Ranked #1 on
3D Shape Classification
on Pix3D
Ranked #1 on
3D Shape Classification
on Pix3D

3D Interpreter Networks for Viewer-Centered Wireframe Modeling
3D-INN is trained on real images to estimate 2D keypoint heatmaps from an input image; it then predicts 3D object structure from heatmaps using knowledge learned from synthetic 3D shapes.

Learning Sight from Sound: Ambient Sound Provides Supervision for Visual Learning
The sound of crashing waves, the roar of fast-moving cars -- sound conveys important information about the objects in our surroundings.
Learning to See Physics via Visual De-animation
At the core of our system is a physical world representation that is first recovered by a perception module and then utilized by physics and graphics engines.
Shape and Material from Sound
Hearing an object falling onto the ground, humans can recover rich information including its rough shape, material, and falling height.
Attention Clusters: Purely Attention Based Local Feature Integration for Video Classification
In this paper, however, we show that temporal information, especially longer-term patterns, may not be necessary to achieve competitive results on common video classification datasets.


Video Enhancement with Task-Oriented Flow
Many video enhancement algorithms rely on optical flow to register frames in a video sequence.
 Ranked #7 on
Video Frame Interpolation
on Middlebury
Ranked #7 on
Video Frame Interpolation
on Middlebury
Self-Supervised Intrinsic Image Decomposition
Intrinsic decomposition from a single image is a highly challenging task, due to its inherent ambiguity and the scarcity of training data.
MarrNet: 3D Shape Reconstruction via 2.5D Sketches
First, compared to full 3D shape, 2. 5D sketches are much easier to be recovered from a 2D image; models that recover 2. 5D sketches are also more likely to transfer from synthetic to real data.
Ranked #2 on
3D Shape Classification
on Pix3D
 3D Object Reconstruction From A Single Image
3D Object Reconstruction From A Single Image
 3D Reconstruction
+3
3D Reconstruction
+3
Raster-To-Vector: Revisiting Floorplan Transformation
A neural architecture first transforms a rasterized image to a set of junctions that represent low-level geometric and semantic information (e. g., wall corners or door end-points).

Generative Modeling of Audible Shapes for Object Perception
Humans infer rich knowledge of objects from both auditory and visual cues.
Synthesizing 3D Shapes via Modeling Multi-View Depth Maps and Silhouettes With Deep Generative Networks
We take an alternative approach: learning a generative model over multi-view depth maps or their corresponding silhouettes, and using a deterministic rendering function to produce 3D shapes from these images.
Neural Scene De-Rendering
Our approach employs a deterministic rendering function as the decoder, mapping a naturally structured and disentangled scene description, which we named scene XML, to an image.
Deep Multi-Modal Image Correspondence Learning
Our result implies that neural networks are effective at perceptual tasks that require long periods of reasoning even for humans to solve.
Learning a Probabilistic Latent Space of Object Shapes via 3D Generative-Adversarial Modeling
We study the problem of 3D object generation.
Ranked #3 on
3D Shape Classification
on Pix3D
 3D Object Recognition
3D Point Cloud Linear Classification
+3
3D Object Recognition
3D Point Cloud Linear Classification
+3
Ambient Sound Provides Supervision for Visual Learning
We show that, through this process, the network learns a representation that conveys information about objects and scenes.

Visual Dynamics: Probabilistic Future Frame Synthesis via Cross Convolutional Networks
We study the problem of synthesizing a number of likely future frames from a single input image.
A Comparative Evaluation of Approximate Probabilistic Simulation and Deep Neural Networks as Accounts of Human Physical Scene Understanding
Humans demonstrate remarkable abilities to predict physical events in complex scenes.
Single Image 3D Interpreter Network
In this work, we propose 3D INterpreter Network (3D-INN), an end-to-end framework which sequentially estimates 2D keypoint heatmaps and 3D object structure, trained on both real 2D-annotated images and synthetic 3D data.
Galileo: Perceiving Physical Object Properties by Integrating a Physics Engine with Deep Learning
Humans demonstrate remarkable abilities to predict physical events in dynamic scenes, and to infer the physical properties of objects from static images.
Deep Multiple Instance Learning for Image Classification and Auto-Annotation
The recent development in learning deep representations has demonstrated its wide applications in traditional vision tasks like classification and detection.
MILCut: A Sweeping Line Multiple Instance Learning Paradigm for Interactive Image Segmentation
Interactive segmentation, in which a user provides a bounding box to an object of interest for image segmentation, has been applied to a variety of applications in image editing, crowdsourcing, computer vision, and medical imaging.
Harvesting Mid-level Visual Concepts from Large-Scale Internet Images
Obtaining effective mid-level representations has become an increasingly important task in computer vision.

