Search Results for author:
Found 365 papers, 117 papers with code
Recalibrating Fully Convolutional Networks with Spatial and Channel 'Squeeze & Excitation' Blocks
Towards this end, we introduce three variants of SE modules for segmentation, (i) squeezing spatially and exciting channel-wise, (ii) squeezing channel-wise and exciting spatially and (iii) joint spatial and channel 'squeeze & excitation'.


V-Net: Fully Convolutional Neural Networks for Volumetric Medical Image Segmentation
Convolutional Neural Networks (CNNs) have been recently employed to solve problems from both the computer vision and medical image analysis fields.


Deeper Depth Prediction with Fully Convolutional Residual Networks
This paper addresses the problem of estimating the depth map of a scene given a single RGB image.

An Efficient Training Algorithm for Kernel Survival Support Vector Machines
Survival analysis is a fundamental tool in medical research to identify predictors of adverse events and develop systems for clinical decision support.

Deep Residual Learning for Instrument Segmentation in Robotic Surgery
Detection, tracking, and pose estimation of surgical instruments are crucial tasks for computer assistance during minimally invasive robotic surgery.

Structure-SLAM: Low-Drift Monocular SLAM in Indoor Environments
In this paper a low-drift monocular SLAM method is proposed targeting indoor scenarios, where monocular SLAM often fails due to the lack of textured surfaces.
Robotics
RGB-D SLAM with Structural Regularities
This work proposes a RGB-D SLAM system specifically designed for structured environments and aimed at improved tracking and mapping accuracy by relying on geometric features that are extracted from the surrounding.
Robotics
SSD-6D: Making RGB-based 3D detection and 6D pose estimation great again
We present a novel method for detecting 3D model instances and estimating their 6D poses from RGB data in a single shot.
 Ranked #1 on
6D Pose Estimation using RGBD
on Tejani
Ranked #1 on
6D Pose Estimation using RGBD
on Tejani


Concurrent Spatial and Channel Squeeze & Excitation in Fully Convolutional Networks
Fully convolutional neural networks (F-CNNs) have set the state-of-the-art in image segmentation for a plethora of applications.
`Project & Excite' Modules for Segmentation of Volumetric Medical Scans
Fully Convolutional Neural Networks (F-CNNs) achieve state-of-the-art performance for image segmentation in medical imaging.
SO-Pose: Exploiting Self-Occlusion for Direct 6D Pose Estimation
Directly regressing all 6 degrees-of-freedom (6DoF) for the object pose (e. g. the 3D rotation and translation) in a cluttered environment from a single RGB image is a challenging problem.
 Ranked #1 on
6D Pose Estimation using RGB
on Occlusion LineMOD
Ranked #1 on
6D Pose Estimation using RGB
on Occlusion LineMOD
CNN-SLAM: Real-time dense monocular SLAM with learned depth prediction
Given the recent advances in depth prediction from Convolutional Neural Networks (CNNs), this paper investigates how predicted depth maps from a deep neural network can be deployed for accurate and dense monocular reconstruction.

X-ray-transform Invariant Anatomical Landmark Detection for Pelvic Trauma Surgery
In this work, we present a method to automatically detect anatomical landmarks in X-ray images independent of the viewing direction.
DeepDRR -- A Catalyst for Machine Learning in Fluoroscopy-guided Procedures
Machine learning-based approaches outperform competing methods in most disciplines relevant to diagnostic radiology.

Autoencoders for Unsupervised Anomaly Segmentation in Brain MR Images: A Comparative Study
Deep unsupervised representation learning has recently led to new approaches in the field of Unsupervised Anomaly Detection (UAD) in brain MRI.
SUPRA: Open Source Software Defined Ultrasound Processing for Real-Time Applications
Including all processing stages of a usual ultrasound pipeline, the run-time analysis shows that it can be executed in 2D and 3D on consumer GPUs in real-time.
RIO: 3D Object Instance Re-Localization in Changing Indoor Environments
In this work, we introduce the task of 3D object instance re-localization (RIO): given one or multiple objects in an RGB-D scan, we want to estimate their corresponding 6DoF poses in another 3D scan of the same environment taken at a later point in time.
Shape Completion in the Dark: Completing Vertebrae Morphology from 3D Ultrasound
Purpose: Ultrasound (US) imaging, while advantageous for its radiation-free nature, is challenging to interpret due to only partially visible organs and a lack of complete 3D information.
Segmentation in Style: Unsupervised Semantic Image Segmentation with Stylegan and CLIP
Derived regions are consistent across different images and coincide with human-defined semantic classes on some datasets.
SceneGraphFusion: Incremental 3D Scene Graph Prediction from RGB-D Sequences
Scene graphs are a compact and explicit representation successfully used in a variety of 2D scene understanding tasks.
 Ranked #1 on
3D Object Classification
on 3R-Scan
Ranked #1 on
3D Object Classification
on 3R-Scan

Self6D: Self-Supervised Monocular 6D Object Pose Estimation
6D object pose estimation is a fundamental problem in computer vision.
ZebraPose: Coarse to Fine Surface Encoding for 6DoF Object Pose Estimation
Dense methods also improved pose estimation in the presence of occlusion.
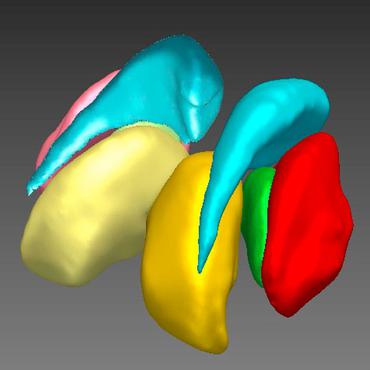
QuickNAT: A Fully Convolutional Network for Quick and Accurate Segmentation of Neuroanatomy
We introduce QuickNAT, a fully convolutional, densely connected neural network that segments a \revision{MRI brain scan} in 20 seconds.
Bayesian QuickNAT: Model Uncertainty in Deep Whole-Brain Segmentation for Structure-wise Quality Control
Next to voxel-wise uncertainty, we introduce four metrics to quantify structure-wise uncertainty in segmentation for quality control.
'Squeeze & Excite' Guided Few-Shot Segmentation of Volumetric Images
This representation is passed on to the segmenter arm that uses this information to segment the new query image.
Sampling-free Epistemic Uncertainty Estimation Using Approximated Variance Propagation
We present a sampling-free approach for computing the epistemic uncertainty of a neural network.
ReLayNet: Retinal Layer and Fluid Segmentation of Macular Optical Coherence Tomography using Fully Convolutional Network
Optical coherence tomography (OCT) is used for non-invasive diagnosis of diabetic macular edema assessing the retinal layers.
Fully-Convolutional Point Networks for Large-Scale Point Clouds
This work proposes a general-purpose, fully-convolutional network architecture for efficiently processing large-scale 3D data.
 Ranked #27 on
Semantic Segmentation
on ScanNet
Ranked #27 on
Semantic Segmentation
on ScanNet
SoftPoolNet: Shape Descriptor for Point Cloud Completion and Classification
In this paper, we propose a method for 3D object completion and classification based on point clouds.


GPV-Pose: Category-level Object Pose Estimation via Geometry-guided Point-wise Voting
While 6D object pose estimation has recently made a huge leap forward, most methods can still only handle a single or a handful of different objects, which limits their applications.
 Ranked #1 on
6D Pose Estimation
on LineMOD
(Mean ADD-S metric)
Ranked #1 on
6D Pose Estimation
on LineMOD
(Mean ADD-S metric)
Semantic Image Manipulation Using Scene Graphs
In our work, we address the novel problem of image manipulation from scene graphs, in which a user can edit images by merely applying changes in the nodes or edges of a semantic graph that is generated from the image.

StainGAN: Stain Style Transfer for Digital Histological Images
Digitized Histological diagnosis is in increasing demand.
Fairness by Learning Orthogonal Disentangled Representations
We explicitly enforce the meaningful representation to be agnostic to sensitive information by entropy maximization.
Graph-to-3D: End-to-End Generation and Manipulation of 3D Scenes Using Scene Graphs
Scene graphs are representations of a scene, composed of objects (nodes) and inter-object relationships (edges), proven to be particularly suited for this task, as they allow for semantic control on the generated content.
CommonScenes: Generating Commonsense 3D Indoor Scenes with Scene Graph Diffusion
The generated scenes can be manipulated by editing the input scene graph and sampling the noise in the diffusion model.
Deep Model-Based 6D Pose Refinement in RGB
We present a novel approach for model-based 6D pose refinement in color data.

SCFusion: Real-time Incremental Scene Reconstruction with Semantic Completion
We propose a framework that ameliorates this issue by performing scene reconstruction and semantic scene completion jointly in an incremental and real-time manner, based on an input sequence of depth maps.

Human Motion Analysis with Deep Metric Learning
Nevertheless, we believe that traditional approaches such as L2 distance or Dynamic Time Warping based on hand-crafted local pose metrics fail to appropriately capture the semantic relationship across motions and, as such, are not suitable for being employed as metrics within these tasks.

Differentiable Graph Module (DGM) for Graph Convolutional Networks
We provide an extensive evaluation of applications from the domains of healthcare (disease prediction), brain imaging (age prediction), computer graphics (3D point cloud segmentation), and computer vision (zero-shot learning).
TeCNO: Surgical Phase Recognition with Multi-Stage Temporal Convolutional Networks
Automatic surgical phase recognition is a challenging and crucial task with the potential to improve patient safety and become an integral part of intra-operative decision-support systems.
 Ranked #4 on
Surgical phase recognition
on Cholec80
Ranked #4 on
Surgical phase recognition
on Cholec80
RaDialog: A Large Vision-Language Model for Radiology Report Generation and Conversational Assistance
Conversational AI tools that can generate and discuss clinically correct radiology reports for a given medical image have the potential to transform radiology.

Uncertainty-based graph convolutional networks for organ segmentation refinement
In this context, we proposed a segmentation refinement method based on uncertainty analysis and graph convolutional networks.
An Uncertainty-Driven GCN Refinement Strategy for Organ Segmentation
In this context, we proposed a segmentation refinement method based on uncertainty analysis and graph convolutional networks.
4D-OR: Semantic Scene Graphs for OR Domain Modeling
Towards this goal, for the first time, we propose using semantic scene graphs (SSG) to describe and summarize the surgical scene.
 Ranked #4 on
Scene Graph Generation
on 4D-OR
Ranked #4 on
Scene Graph Generation
on 4D-OR
CFCM: Segmentation via Coarse to Fine Context Memory
Recent neural-network-based architectures for image segmentation make extensive usage of feature forwarding mechanisms to integrate information from multiple scales.
Ultra-NeRF: Neural Radiance Fields for Ultrasound Imaging
In our work, we discuss direction-dependent changes in the scene and show that a physics-inspired rendering improves the fidelity of US image synthesis.

Fine-Grained Neural Network Explanation by Identifying Input Features with Predictive Information
We propose a method to identify features with predictive information in the input domain.
Y-Net: A Spatiospectral Dual-Encoder Networkfor Medical Image Segmentation
Automated segmentation of retinal optical coherence tomography (OCT) images has become an important recent direction in machine learning for medical applications.
 Ranked #1 on
Retinal OCT Layer Segmentation
on Duke SD-OCT
(using extra training data)
Ranked #1 on
Retinal OCT Layer Segmentation
on Duke SD-OCT
(using extra training data)

CholecTriplet2022: Show me a tool and tell me the triplet -- an endoscopic vision challenge for surgical action triplet detection
This paper presents the CholecTriplet2022 challenge, which extends surgical action triplet modeling from recognition to detection.
 Ranked #1 on
Action Triplet Detection
on CholecT50 (Challenge)
Ranked #1 on
Action Triplet Detection
on CholecT50 (Challenge)
MI-SegNet: Mutual Information-Based US Segmentation for Unseen Domain Generalization
We validate the generalizability of the proposed domain-independent segmentation approach on several datasets with varying parameters and machines.
DISA: DIfferentiable Similarity Approximation for Universal Multimodal Registration
Our method is several orders of magnitude faster than local patch-based metrics and can be directly applied in clinical settings by replacing the similarity measure with the proposed one.

6D Camera Relocalization in Ambiguous Scenes via Continuous Multimodal Inference
We present a multimodal camera relocalization framework that captures ambiguities and uncertainties with continuous mixture models defined on the manifold of camera poses.
Object-aware Monocular Depth Prediction with Instance Convolutions
With the advent of deep learning, estimating depth from a single RGB image has recently received a lot of attention, being capable of empowering many different applications ranging from path planning for robotics to computational cinematography.
CheXplaining in Style: Counterfactual Explanations for Chest X-rays using StyleGAN
Deep learning models used in medical image analysis are prone to raising reliability concerns due to their black-box nature.
Image to Images Translation for Multi-Task Organ Segmentation and Bone Suppression in Chest X-Ray Radiography
Chest X-ray radiography is one of the earliest medical imaging technologies and remains one of the most widely-used for diagnosis, screening, and treatment follow up of diseases related to lungs and heart.
Rad-ReStruct: A Novel VQA Benchmark and Method for Structured Radiology Reporting
However, there is limited research on automating structured reporting, and no public benchmark is available for evaluating and comparing different methods.
 Ranked #1 on
Structured Report Generation
on Rad-ReStruct
Ranked #1 on
Structured Report Generation
on Rad-ReStruct

SecondPose: SE(3)-Consistent Dual-Stream Feature Fusion for Category-Level Pose Estimation
Leveraging the advantage of DINOv2 in providing SE(3)-consistent semantic features, we hierarchically extract two types of SE(3)-invariant geometric features to further encapsulate local-to-global object-specific information.
Ultrasound-Guided Robotic Navigation with Deep Reinforcement Learning
In this paper we introduce the first reinforcement learning (RL) based robotic navigation method which utilizes ultrasound (US) images as an input.
Curriculum learning for improved femur fracture classification: scheduling data with prior knowledge and uncertainty
In this paper, we propose a method for the automatic classification of proximal femur fractures into 3 and 7 AO classes based on a Convolutional Neural Network (CNN).
RA-GCN: Graph Convolutional Network for Disease Prediction Problems with Imbalanced Data
This is accomplished by associating a graph-based neural network to each class, which is responsible for weighting the class samples and changing the importance of each sample for the classifier.

A Variational Bayesian Method for Similarity Learning in Non-Rigid Image Registration
We propose a novel variational Bayesian formulation for diffeomorphic non-rigid registration of medical images, which learns in an unsupervised way a data-specific similarity metric.
Xplainer: From X-Ray Observations to Explainable Zero-Shot Diagnosis
Automated diagnosis prediction from medical images is a valuable resource to support clinical decision-making.
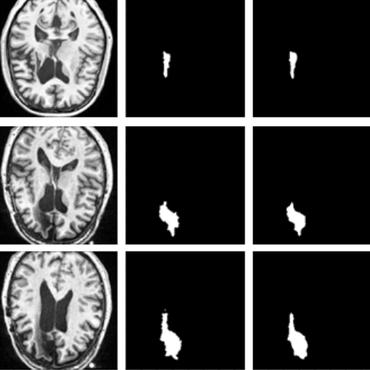
Spatio-temporal Learning from Longitudinal Data for Multiple Sclerosis Lesion Segmentation
Our results show that spatio-temporal information in longitudinal data is a beneficial cue for improving segmentation.

On the Importance of Accurate Geometry Data for Dense 3D Vision Tasks
Learning-based methods to solve dense 3D vision problems typically train on 3D sensor data.
LumiPath -- Towards Real-time Physically-based Rendering on Embedded Devices
With the increasing computational power of today's workstations, real-time physically-based rendering is within reach, rapidly gaining attention across a variety of domains.
Advancing Surgical VQA with Scene Graph Knowledge
We highlight that the primary limitation in the current surgical VQA systems is the lack of scene knowledge to answer complex queries.
Simultaneous imputation and disease classification in incomplete medical datasets using Multigraph Geometric Matrix Completion (MGMC)
As a solution, we propose an end-to-end learning of imputation and disease prediction of incomplete medical datasets via Multigraph Geometric Matrix Completion (MGMC).
SupeRGB-D: Zero-shot Instance Segmentation in Cluttered Indoor Environments
We introduce a zero-shot split for Tabletop Objects Dataset (TOD-Z) to enable this study and present a method that uses annotated objects to learn the ``objectness'' of pixels and generalize to unseen object categories in cluttered indoor environments.

S3M: Scalable Statistical Shape Modeling through Unsupervised Correspondences
Statistical shape models (SSMs) are an established way to represent the anatomy of a population with various clinically relevant applications.
Neural Response Interpretation through the Lens of Critical Pathways
Is critical input information encoded in specific sparse pathways within the neural network?
Unsupervised Pre-Training on Patient Population Graphs for Patient-Level Predictions
We test our method on two medical datasets of patient records, TADPOLE and MIMIC-III, including imaging and non-imaging features and different prediction tasks.
 Ranked #1 on
Length-of-Stay prediction
on MIMIC-III
Ranked #1 on
Length-of-Stay prediction
on MIMIC-III

Unsupervised pre-training of graph transformers on patient population graphs
We find that our proposed pre-training methods help in modeling the data at a patient and population level and improve performance in different fine-tuning tasks on all datasets.
PRO-TIP: Phantom for RObust automatic ultrasound calibration by TIP detection
We propose a novel method to automatically calibrate tracked ultrasound probes.
Patient-specific virtual spine straightening and vertebra inpainting: An automatic framework for osteoplasty planning
The framework uses the patient CT scan and the fractured vertebra label to build a virtual healthy spine using a high-level approach.
CACTUSS: Common Anatomical CT-US Space for US examinations
Abdominal aortic aneurysm (AAA) is a vascular disease in which a section of the aorta enlarges, weakening its walls and potentially rupturing the vessel.

Explaining COVID-19 and Thoracic Pathology Model Predictions by Identifying Informative Input Features
Neural networks have demonstrated remarkable performance in classification and regression tasks on chest X-rays.
MIGS: Meta Image Generation from Scene Graphs
We propose MIGS (Meta Image Generation from Scene Graphs), a meta-learning based approach for few-shot image generation from graphs that enables adapting the model to different scenes and increases the image quality by training on diverse sets of tasks.


Interpretable Vertebral Fracture Diagnosis
Do black-box neural network models learn clinically relevant features for fracture diagnosis?
VesNet-RL: Simulation-based Reinforcement Learning for Real-World US Probe Navigation
The results demonstrate that proposed approach can effectively and accurately navigate the probe towards the longitudinal view of vessels.
Semi-Supervised Deep Learning for Fully Convolutional Networks
Deep learning usually requires large amounts of labeled training data, but annotating data is costly and tedious.
Robust Optimization for Deep Regression
Convolutional Neural Networks (ConvNets) have successfully contributed to improve the accuracy of regression-based methods for computer vision tasks such as human pose estimation, landmark localization, and object detection.

HouseCat6D -- A Large-Scale Multi-Modal Category Level 6D Object Perception Dataset with Household Objects in Realistic Scenarios
Estimating 6D object poses is a major challenge in 3D computer vision.
Prior-RadGraphFormer: A Prior-Knowledge-Enhanced Transformer for Generating Radiology Graphs from X-Rays
The extraction of structured clinical information from free-text radiology reports in the form of radiology graphs has been demonstrated to be a valuable approach for evaluating the clinical correctness of report-generation methods.
LOTUS: Learning to Optimize Task-based US representations
Anatomical segmentation of organs in ultrasound images is essential to many clinical applications, particularly for diagnosis and monitoring.
ROAM: Random Layer Mixup for Semi-Supervised Learning in Medical Imaging
Medical image segmentation is one of the major challenges addressed by machine learning methods.
Semi-Supervised Federated Peer Learning for Skin Lesion Classification
With few annotated data, FedPerl is on par with a state-of-the-art method in skin lesion classification in the standard setup while outperforming SSFLs and the baselines by 1. 8% and 15. 8%, respectively.
Towards Semantic Interpretation of Thoracic Disease and COVID-19 Diagnosis Models
We present our findings using publicly available chest pathologies (CheXpert, NIH ChestX-ray8) and COVID-19 datasets (BrixIA, and COVID-19 chest X-ray segmentation dataset).

Towards Autonomous Atlas-based Ultrasound Acquisitions in Presence of Articulated Motion
Robotic ultrasound (US) imaging aims at overcoming some of the limitations of free-hand US examinations, e. g. difficulty in guaranteeing intra- and inter-operator repeatability.
Robot-Assisted Deep Venous Thrombosis Ultrasound Examination using Virtual Fixture
To ensure the biometric measurements obtained in different examinations are comparable, the 6D scanning path is determined in a coarse-to-fine manner using both an external RGBD camera and US images.
Semi-Supervised Few-Shot Learning with Prototypical Random Walks
We develop a random walk semi-supervised loss that enables the network to learn representations that are compact and well-separated.
Co-Generation and Segmentation for Generalized Surgical Instrument Segmentation on Unlabelled Data
The method leverages the availability of labelled data in a different domain.
LABRAD-OR: Lightweight Memory Scene Graphs for Accurate Bimodal Reasoning in Dynamic Operating Rooms
The holistic representation of surgical scenes as semantic scene graphs (SGG), where entities are represented as nodes and relations between them as edges, is a promising direction for fine-grained semantic OR understanding.
Ranked #3 on
Scene Graph Generation
on 4D-OR
Learning Multi-modal Representations by Watching Hundreds of Surgical Video Lectures
SurgVLP constructs a new contrastive learning objective to align video clip embeddings with the corresponding multiple text embeddings by bringing them together within a joint latent space.

Deep Autoencoding Models for Unsupervised Anomaly Segmentation in Brain MR Images
Reliably modeling normality and differentiating abnormal appearances from normal cases is a very appealing approach for detecting pathologies in medical images.

Attention based Multiple Instance Learning for Classification of Blood Cell Disorders
In blood cell disorders, only a subset of all cells is morphologically altered and relevant for the diagnosis.
Longitudinal Quantitative Assessment of COVID-19 Infection Progression from Chest CTs
Chest computed tomography (CT) has played an essential diagnostic role in assessing patients with COVID-19 by showing disease-specific image features such as ground-glass opacity and consolidation.

GKD: Semi-supervised Graph Knowledge Distillation for Graph-Independent Inference
The soft pseudo-labels are then used to train a deep student network for disease prediction of unseen test data for which the graph modality is unavailable.
Unsupervised Cross-Domain Feature Extraction for Single Blood Cell Image Classification
Here, we propose a cross-domain adapted autoencoder to extract features in an unsupervised manner on three different datasets of single white blood cells scanned from peripheral blood smears.
Intelligent Robotic Sonographer: Mutual Information-based Disentangled Reward Learning from Few Demonstrations
The results demonstrated that the proposed advanced framework can robustly work on a variety of seen and unseen phantoms as well as in-vivo human carotid data.
Motion Magnification in Robotic Sonography: Enabling Pulsation-Aware Artery Segmentation
To validate the proposed robotic US system for imaging arteries, experiments are carried out on volunteers' carotid and radial arteries.
Thoracic Cartilage Ultrasound-CT Registration using Dense Skeleton Graph
To address this challenge, a graph-based non-rigid registration is proposed to enable transferring planned paths from the atlas to the current setup by explicitly considering subcutaneous bone surface features instead of the skin surface.
DisguisOR: Holistic Face Anonymization for the Operating Room
Methods: RGB and depth images from multiple cameras are fused into a 3D point cloud representation of the scene.
DefCor-Net: Physics-Aware Ultrasound Deformation Correction
The recovery of morphologically accurate anatomical images from deformed ones is challenging in ultrasound (US) image acquisition, but crucial to accurate and consistent diagnosis, particularly in the emerging field of computer-assisted diagnosis.
On the Localization of Ultrasound Image Slices within Point Distribution Models
We demonstrate that our multi-modal registration framework can localize images on the 3D surface topology of a patient-specific organ and the mean shape of an SSM.


Force-Ultrasound Fusion: Bringing Spine Robotic-US to the Next "Level"
Processed force and ultrasound data are fused using a 1D Convolutional Network to compute the location of the vertebral levels.
Scale-Space Autoencoders for Unsupervised Anomaly Segmentation in Brain MRI
Brain pathologies can vary greatly in size and shape, ranging from few pixels (i. e. MS lesions) to large, space-occupying tumors.
Graphite: GRAPH-Induced feaTure Extraction for Point Cloud Registration
3D Point clouds are a rich source of information that enjoy growing popularity in the vision community.

Deep Bingham Networks: Dealing with Uncertainty and Ambiguity in Pose Estimation
For the former we contributed our own dataset composed of five indoor scenes where it is unavoidable to capture images corresponding to views that are hard to uniquely identify.
Speckle2Speckle: Unsupervised Learning of Ultrasound Speckle Filtering Without Clean Data
To enable this, we make use of realistic ultrasound simulation techniques that allow for instantiation of several independent speckle realizations that represent the exact same tissue, thus allowing for the application of image reconstruction techniques that work with pairs of differently corrupted data.
KST-Mixer: Kinematic Spatio-Temporal Data Mixer For Colon Shape Estimation
Kinematic data of a colonoscope and the colon, including positions and directions of their centerlines, are obtained using electromagnetic and depth sensors.
Fourier Transform of Percoll Gradients Boosts CNN Classification of Hereditary Hemolytic Anemias
Hereditary hemolytic anemias are genetic disorders that affect the shape and density of red blood cells.
Intelligent Masking: Deep Q-Learning for Context Encoding in Medical Image Analysis
We show that training the agent against the prediction model can significantly improve the semantic features extracted for downstream classification tasks.


DopUS-Net: Quality-Aware Robotic Ultrasound Imaging based on Doppler Signal
The experimental results demonstrate that the proposed approach with the re-identification process can significantly improve the accuracy and robustness of the segmentation results (dice score: from 0:54 to 0:86; intersection over union: from 0:47 to 0:78).
Markerless Inside-Out Tracking for Interventional Applications
Tracking of rotation and translation of medical instruments plays a substantial role in many modern interventions.
Initialize globally before acting locally: Enabling Landmark-free 3D US to MRI Registration
Registration of partial-view 3D US volumes with MRI data is influenced by initialization.
Inherent Brain Segmentation Quality Control from Fully ConvNet Monte Carlo Sampling
We introduce inherent measures for effective quality control of brain segmentation based on a Bayesian fully convolutional neural network, using model uncertainty.
Machine learning-based colon deformation estimation method for colonoscope tracking
An estimation method of colon deformations occur during colonoscope insertions is necessary to reduce tracking errors.
Scene Coordinate and Correspondence Learning for Image-Based Localization
Scene coordinate regression has become an essential part of current camera re-localization methods.
Generalizing multistain immunohistochemistry tissue segmentation using one-shot color deconvolution deep neural networks
A key challenge in cancer immunotherapy biomarker research is quantification of pattern changes in microscopic whole slide images of tumor biopsies.
Situation Assessment for Planning Lane Changes: Combining Recurrent Models and Prediction
One of the greatest challenges towards fully autonomous cars is the understanding of complex and dynamic scenes.
When Regression Meets Manifold Learning for Object Recognition and Pose Estimation
By combining the strengths of manifold learning using triplet loss and pose regression, we could either estimate the pose directly reducing the complexity compared to NN search, or use learned descriptor for the NN descriptor matching.

Multi Layered-Parallel Graph Convolutional Network (ML-PGCN) for Disease Prediction
Structural data from Electronic Health Records as complementary information to imaging data for disease prediction.
Analyzing and Exploiting NARX Recurrent Neural Networks for Long-Term Dependencies
Recurrent neural networks (RNNs) have achieved state-of-the-art performance on many diverse tasks, from machine translation to surgical activity recognition, yet training RNNs to capture long-term dependencies remains difficult.

Domain and Geometry Agnostic CNNs for Left Atrium Segmentation in 3D Ultrasound
Segmentation of the left atrium and deriving its size can help to predict and detect various cardiovascular conditions.
MelanoGANs: High Resolution Skin Lesion Synthesis with GANs
Generative Adversarial Networks (GANs) have been successfully used to synthesize realistically looking images of faces, scenery and even medical images.
Exploiting Partial Structural Symmetry For Patient-Specific Image Augmentation in Trauma Interventions
The main challenge is to automatically estimate the desired plane of symmetry within the patient's pre-operative CT. We propose to estimate this plane using a non-linear optimization strategy, by minimizing Tukey's biweight robust estimator, relying on the partial symmetry of the anatomy.

Webly Supervised Learning for Skin Lesion Classification
Within medical imaging, manual curation of sufficient well-labeled samples is cost, time and scale-prohibitive.
Multi-modal Disease Classification in Incomplete Datasets Using Geometric Matrix Completion
In this work, we follow up on the idea of modeling multi-modal disease classification as a matrix completion problem, with simultaneous classification and non-linear imputation of features.
Guide Me: Interacting with Deep Networks
Interaction and collaboration between humans and intelligent machines has become increasingly important as machine learning methods move into real-world applications that involve end users.

Generalizability vs. Robustness: Adversarial Examples for Medical Imaging
In this paper, for the first time, we propose an evaluation method for deep learning models that assesses the performance of a model not only in an unseen test scenario, but also in extreme cases of noise, outliers and ambiguous input data.
Closing the Calibration Loop: An Inside-out-tracking Paradigm for Augmented Reality in Orthopedic Surgery
In percutaneous orthopedic interventions the surgeon attempts to reduce and fixate fractures in bony structures.

A Minimalist Approach to Type-Agnostic Detection of Quadrics in Point Clouds
As opposed to state-of-the-art, where a tailored algorithm treats each primitive type separately, we propose to encapsulate all types in a single robust detection procedure.
Fast 5DOF Needle Tracking in iOCT
We propose to build on its desirable qualities and present a method for tracking the orientation and location of a surgical needle.
On-the-fly Augmented Reality for Orthopaedic Surgery Using a Multi-Modal Fiducial
Then, annotations on the 2D X-ray images can be rendered as virtual objects in 3D providing surgical guidance.
Plan in 2D, execute in 3D: An augmented reality solution for cup placement in total hip arthroplasty
Reproducibly achieving proper implant alignment is a critical step in total hip arthroplasty (THA) procedures that has been shown to substantially affect patient outcome.
Multi-layer Visualization for Medical Mixed Reality
In this paper and to our knowledge, we propose a multi-layer visualization in Medical Mixed Reality solution which subtly improves a surgeon's visualization by making transparent the occluding objects.
6D Object Pose Estimation with Depth Images: A Seamless Approach for Robotic Interaction and Augmented Reality
To determine the 3D orientation and 3D location of objects in the surroundings of a camera mounted on a robot or mobile device, we developed two powerful algorithms in object detection and temporal tracking that are combined seamlessly for robotic perception and interaction as well as Augmented Reality (AR).
The TUM LapChole dataset for the M2CAI 2016 workflow challenge
In this technical report we present our collected dataset of laparoscopic cholecystectomies (LapChole).
Camera Pose Filtering with Local Regression Geodesics on the Riemannian Manifold of Dual Quaternions
Time-varying, smooth trajectory estimation is of great interest to the vision community for accurate and well behaving 3D systems.
Learning in an Uncertain World: Representing Ambiguity Through Multiple Hypotheses
In future prediction, for example, many distinct outcomes are equally valid.
Long Short-Term Memory Kalman Filters:Recurrent Neural Estimators for Pose Regularization
One-shot pose estimation for tasks such as body joint localization, camera pose estimation, and object tracking are generally noisy, and temporal filters have been extensively used for regularization.

Concurrent Segmentation and Localization for Tracking of Surgical Instruments
Real-time instrument tracking is a crucial requirement for various computer-assisted interventions.
Error Corrective Boosting for Learning Fully Convolutional Networks with Limited Data
While large datasets of unlabeled image data are available in medical applications, access to manually labeled data is very limited.
Segmentation of Intracranial Arterial Calcification with Deeply Supervised Residual Dropout Networks
In this paper, we propose a method for automatic segmentation of ICAC; the first to our knowledge.
Learning-based Surgical Workflow Detection from Intra-Operative Signals
A modern operating room (OR) provides a plethora of advanced medical devices.
X-ray In-Depth Decomposition: Revealing The Latent Structures
X-ray radiography is the most readily available imaging modality and has a broad range of applications that spans from diagnosis to intra-operative guidance in cardiac, orthopedics, and trauma procedures.
Learning Robust Hash Codes for Multiple Instance Image Retrieval
In this paper, for the first time, we introduce a multiple instance (MI) deep hashing technique for learning discriminative hash codes with weak bag-level supervision suited for large-scale retrieval.

Cross-Modal Manifold Learning for Cross-modal Retrieval
This paper presents a new scalable algorithm for cross-modal similarity preserving retrieval in a learnt manifold space.
Deep Residual Hashing
Hashing aims at generating highly compact similarity preserving code words which are well suited for large-scale image retrieval tasks.
Hands-Free Segmentation of Medical Volumes via Binary Inputs
We propose a novel hands-free method to interactively segment 3D medical volumes.
A Deep Metric for Multimodal Registration
Multimodal registration is a challenging problem in medical imaging due the high variability of tissue appearance under different imaging modalities.
Mitosis Detection in Intestinal Crypt Images with Hough Forest and Conditional Random Fields
A statistical analysis of these measurements requires annotation of mitosis events, which is currently a tedious and time-consuming task that has to be performed manually.
An Octree-Based Approach towards Efficient Variational Range Data Fusion
Volume-based reconstruction is usually expensive both in terms of memory consumption and runtime.
Hashmod: A Hashing Method for Scalable 3D Object Detection
We present a scalable method for detecting objects and estimating their 3D poses in RGB-D data.

Deep Learning of Local RGB-D Patches for 3D Object Detection and 6D Pose Estimation
We present a 3D object detection method that uses regressed descriptors of locally-sampled RGB-D patches for 6D vote casting.
Deep Active Contours
We propose a method for interactive boundary extraction which combines a deep, patch-based representation with an active contour framework.
A Taxonomy and Library for Visualizing Learned Features in Convolutional Neural Networks
Over the last decade, Convolutional Neural Networks (CNN) saw a tremendous surge in performance.
Hough-CNN: Deep Learning for Segmentation of Deep Brain Regions in MRI and Ultrasound
In this work we propose a novel approach to perform segmentation by leveraging the abstraction capabilities of convolutional neural networks (CNNs).
Semi-Automatic Segmentation of Autosomal Dominant Polycystic Kidneys using Random Forests
This paper presents a method for 3D segmentation of kidneys from patients with autosomal dominant polycystic kidney disease (ADPKD) and severe renal insufficiency, using computed tomography (CT) data.
Augmented Reality-based Feedback for Technician-in-the-loop C-arm Repositioning
For C-arm repositioning to a particular target view, the recorded C-arm pose is restored as a virtual object and visualized in an AR environment, serving as a perceptual reference for the technician.
SynNet: Structure-Preserving Fully Convolutional Networks for Medical Image Synthesis
Cross modal image syntheses is gaining significant interests for its ability to estimate target images of a different modality from a given set of source images, like estimating MR to MR, MR to CT, CT to PET etc, without the need for an actual acquisition. Though they show potential for applications in radiation therapy planning, image super resolution, atlas construction, image segmentation etc. The synthesis results are not as accurate as the actual acquisition. In this paper, we address the problem of multi modal image synthesis by proposing a fully convolutional deep learning architecture called the SynNet. We extend the proposed architecture for various input output configurations.
Competition vs. Concatenation in Skip Connections of Fully Convolutional Networks
Increased information sharing through short and long-range skip connections between layers in fully convolutional networks have demonstrated significant improvement in performance for semantic segmentation.
Peeking Behind Objects: Layered Depth Prediction from a Single Image
While conventional depth estimation can infer the geometry of a scene from a single RGB image, it fails to estimate scene regions that are occluded by foreground objects.
Towards Robotic Eye Surgery: Marker-free, Online Hand-eye Calibration using Optical Coherence Tomography Images
Ophthalmic microsurgery is known to be a challenging operation, which requires very precise and dexterous manipulation.
Deep Learned Full-3D Object Completion from Single View
3D geometry is a very informative cue when interacting with and navigating an environment.
Generating Highly Realistic Images of Skin Lesions with GANs
As many other machine learning driven medical image analysis tasks, skin image analysis suffers from a chronic lack of labeled data and skewed class distributions, which poses problems for the training of robust and well-generalizing models.
GANs for Medical Image Analysis
Generative Adversarial Networks (GANs) and their extensions have carved open many exciting ways to tackle well known and challenging medical image analysis problems such as medical image de-noising, reconstruction, segmentation, data simulation, detection or classification.
Weakly-Supervised Localization and Classification of Proximal Femur Fractures
In this paper, we target the problem of fracture classification from clinical X-Ray images towards an automated Computer Aided Diagnosis (CAD) system.
Virtualization of tissue staining in digital pathology using an unsupervised deep learning approach
Histopathological evaluation of tissue samples is a key practice in patient diagnosis and drug development, especially in oncology.
InfiNet: Fully Convolutional Networks for Infant Brain MRI Segmentation
We present a novel, parameter-efficient and practical fully convolutional neural network architecture, termed InfiNet, aimed at voxel-wise semantic segmentation of infant brain MRI images at iso-intense stage, which can be easily extended for other segmentation tasks involving multi-modalities.
Adversarial Semantic Scene Completion from a Single Depth Image
We propose a method to reconstruct, complete and semantically label a 3D scene from a single input depth image.
The speaker-independent lipreading play-off; a survey of lipreading machines
Lipreading is a difficult gesture classification task.
Dealing with Ambiguity in Robotic Grasping via Multiple Predictions
Further, we reformulate the problem of robotic grasping by replacing conventional grasp rectangles with grasp belief maps, which hold more precise location information than a rectangle and account for the uncertainty inherent to the task.
Redefining Ultrasound Compounding: Computational Sonography
By providing a novel paradigm for the acquisition and reconstruction of tracked freehand 3D ultrasound, this work presents the concept of Computational Sonography (CS) to model the directionality of ultrasound information.
Explaining the Ambiguity of Object Detection and 6D Pose From Visual Data
For each object instance we predict multiple pose and class outcomes to estimate the specific pose distribution generated by symmetries and repetitive textures.
Adversarial Signal Denoising with Encoder-Decoder Networks
The presence of noise is common in signal processing regardless the signal type.

Distortion-Aware Convolutional Filters for Dense Prediction in Panoramic Images
There is a high demand of 3D data for 360° panoramic images and videos, pushed by the growing availability on the market of specialized hardware for both capturing (e. g., omnidirectional cameras) as well as visualizing in 3D (e. g., head mounted displays) panoramic images and videos.
 Ranked #10 on
Depth Estimation
on Stanford2D3D Panoramic
Ranked #10 on
Depth Estimation
on Stanford2D3D Panoramic
Self-Attention Equipped Graph Convolutions for Disease Prediction
A model capable of leveraging the individuality of each multi-modal data is required for better disease prediction.
Generic Primitive Detection in Point Clouds Using Novel Minimal Quadric Fits
Based upon the idea of aligning the quadric gradients with the surface normals, our first formulation is exact and requires as low as four oriented points.
Data Augmentation with Manifold Exploring Geometric Transformations for Increased Performance and Robustness
Compared with traditional augmentation methods, and with images synthesized by Generative Adversarial Networks our method not only achieves state-of-the-art performance but also significantly improves the network's robustness.

3D Pictorial Structures for Multiple Human Pose Estimation
In this work, we address the problem of 3D pose estimation of multiple humans from multiple views.
 Ranked #24 on
3D Multi-Person Pose Estimation
on Shelf
Ranked #24 on
3D Multi-Person Pose Estimation
on Shelf


Human Shape and Pose Tracking Using Keyframes
In contrast to many existing approaches that rely on a single reference model, multiple templates represent a larger variability of human poses.
Total Variation Regularization of Shape Signals
This paper introduces the concept of shape signals, i. e., series of shapes which have a natural temporal or spatial ordering, as well as a variational formulation for the regularization of these signals.
Image Segmentation in Twenty Questions
Consider the following scenario between a human user and the computer.
Toward User-Specific Tracking by Detection of Human Shapes in Multi-Cameras
It usually comprises an association step, that finds correspondences between the model and the input data, and a deformation step, that fits the model to the observations given correspondences.

Volumetric 3D Tracking by Detection
In this paper, we propose a new framework for 3D tracking by detection based on fully volumetric representations.
Weakly-Supervised Structured Output Learning With Flexible and Latent Graphs Using High-Order Loss Functions
We introduce two new structured output models that use a latent graph, which is flexible in terms of the number of nodes and structure, where the training process minimises a high-order loss function using a weakly annotated training set.
A Versatile Learning-Based 3D Temporal Tracker: Scalable, Robust, Online
This paper proposes a temporal tracking algorithm based on Random Forest that uses depth images to estimate and track the 3D pose of a rigid object in real-time.
Long Short-Term Memory Kalman Filters: Recurrent Neural Estimators for Pose Regularization
One-shot pose estimation for tasks such as body joint localization, camera pose estimation, and object tracking are generally noisy, and temporal filters have been extensively used for regularization.
Precise Proximal Femur Fracture Classification for Interactive Training and Surgical Planning
We demonstrate the feasibility of a fully automatic computer-aided diagnosis (CAD) tool, based on deep learning, that localizes and classifies proximal femur fractures on X-ray images according to the AO classification.
Attention-based Lane Change Prediction
Lane change prediction of surrounding vehicles is a key building block of path planning.
InceptionGCN: Receptive Field Aware Graph Convolutional Network for Disease Prediction
Geometric deep learning provides a principled and versatile manner for the integration of imaging and non-imaging modalities in the medical domain.
Adversarial Networks for Camera Pose Regression and Refinement
Despite recent advances on the topic of direct camera pose regression using neural networks, accurately estimating the camera pose of a single RGB image still remains a challenging task.
Deep Learning Under the Microscope: Improving the Interpretability of Medical Imaging Neural Networks
In this paper, we propose a novel interpretation method tailored to histological Whole Slide Image (WSI) processing.
3DQ: Compact Quantized Neural Networks for Volumetric Whole Brain Segmentation
Model architectures have been dramatically increasing in size, improving performance at the cost of resource requirements.
End-to-End Learning-Based Ultrasound Reconstruction
The proposed method displays both promising image reconstruction quality and acquisition frequency when integrated for live ultrasound scanning.
Weakly-Supervised White and Grey Matter Segmentation in 3D Brain Ultrasound
We implement label transfer from MRI to US, which is prone to a residual but inevitable registration error.

Collaboration Analysis Using Deep Learning
The analysis of the collaborative learning process is one of the growing fields of education research, which has many different analytic solutions.
Fully Automatic Segmentation of 3D Brain Ultrasound: Learning from Coarse Annotations
Trained on the dataset alone, we report a Dice and Jaccard coefficient of $0. 45 \pm 0. 09$ and $0. 30 \pm 0. 07$ respectively, as well as an average distance of $0. 78 \pm 0. 36~mm$.
Learning Interpretable Disentangled Representations using Adversarial VAEs
Learning Interpretable representation in medical applications is becoming essential for adopting data-driven models into clinical practice.
